Introduction
L’ERTMS, pour European Rail Traffic Management System, est un système qui vise à harmoniser la signalisation ferroviaire en Europe.
Il est composé de trois sous-systèmes :
Version imprimable multipages. Cliquer ici pour imprimer.
L’ERTMS, pour European Rail Traffic Management System, est un système qui vise à harmoniser la signalisation ferroviaire en Europe.
Il est composé de trois sous-systèmes :
ETCS est le système européen de contrôle commande des trains. La partie bord est interopérable. La partie sol peut être différente selon les pays tout en répondant aux mêmes objectifs de fonctionnalité.
Il existe quatre niveaux différents dont deux sont en service : L’ETCS 1 et L’ETCS 2. L’ETCS 0 est interdit en France. L’ETCS 3 est encore à l’état de développement dans la plupart des pays de l’Union européenne.
Il s’agit d’un système de signalisation de cabine et de contrôle de vitesse faisant appel aux trois composantes suivantes :
Sur le RFN, sont mis en oeuvre les niveaux d’exploitations suivants :
L’ETCS1 sur certaines lignes parcourables jusqu’à 220 km/h. Il correspond à un système de signalisation de cabine, généralement superposé à la signalisation au sol existante, dont les informations entre le sol et le bord sont transmises ponctuellement par eurobalise.
L’ETCS2 sur certaines lignes à grande vitesse. Il correspond à un système de signalisation de cabine dont les informations entre le sol et le bord sont transmises en temps utile ou cycliquement par liaison permanente GSM-R DATA.
L’ETCS2 est un système qui ne nécessite pas la matérialisation des cantons sur le terrain.
Préalablement à tout déplacement, les données relatives au train doivent être saisies ou paramétrées à bord. Ainsi, le système peut, à partir des données bord et sol, superviser le train, c’est-à-dire contrôler sa vitesse et ses déplacements et intervenir en cas de nécessité.
La détection d’une circulation sur une partie de voie est réalisée au moyen de circuits de voie ou de compteurs d’essieux. En ETCS2, la combinaison des équipements sol et bord est telle qu’elle ne nécessite, normalement, pas de signalisation complémentaire au sol.
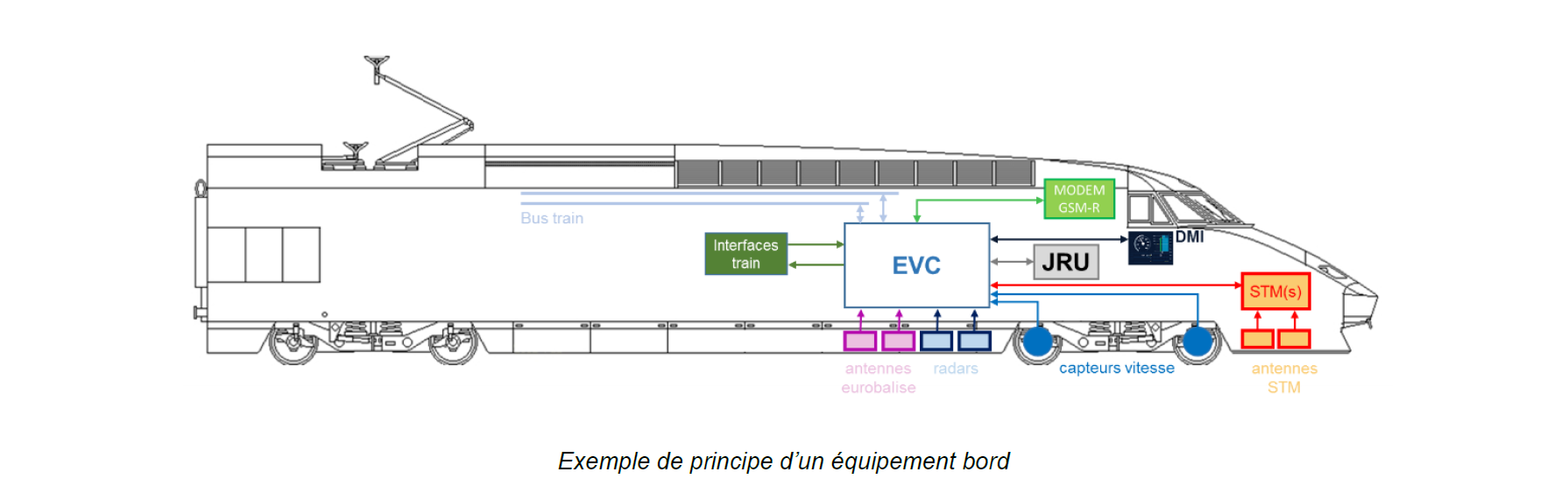
Le bord est constitué d’un DMI, d’un EVC, de capteurs odométriques (de vitesse), d’antennes pour la lecture des PI ETCS, un modem GSM-R (Euroradio) pour ETCS2, d’une unité juridique d’enregistrement des paramètres d’exploitation, d’interfaces avec le train.
Le DMI est l’interface entre le conducteur et la machine. Il permet d’afficher les ordres et instructions en fonction des données sol et/ou bord. Le conducteur renseigne également le système par saisie de données.
L’espacement des circulations et la protection des points dangereux se traduisent par l’affichage en temps utile d’une vitesse but et d’une distance but. La vitesse but doit être respectée par le conducteur au point défini par la distance but.
En « marche normale », le DMI indique au conducteur la vitesse autorisée qui ne doit pas être dépassée. Dans ce cas, il n’y a pas d’affichage de la distance but et de la vitesse but.
Un secteur pouvant présenter différentes couleurs est utilisé pour indiquer les ordres de vitesse ou d’arrêt.
Enfin, d’autres indications sont affichées telles que la signalisation de traction électrique, le niveau d’exploitation, le mode technique. Les changements d’indication au DMI peuvent être accompagnés d’indications sonores. Une zone en partie basse du DMI est également réservée pour l’affichage de messages textuels. Certaines informations complémentaires peuvent également être affichées par l’entreprise ferroviaire.

Dans cet exemple, le conducteur autorisé à circuler à 140 km/h maximum, circule à 125 km/h, il va devoir observer une phase de ralentissement afin de respecter la vitesse maxi de 100 km/h (vitesse But) à une distance de 2850 mètres (distance But).
Le DMI utilise un code couleur, avec la signification suivante :
Ce niveau utilise une transmission ponctuelle à l’aide de balises placées au pied des signaux et en amont. Ces balises (eurobalises) communiquent les données de signalisation au train.
Le niveau 1 nécessite l’utilisation d’un système de détection des trains au sol (tel que des circuits de voie, compteurs d’essieux et autres). Toutes ces informations sont donc transmises ponctuellement au train. La cadence de l’information donnée pouvant être augmentée en jouant sur le nombre de balises, ou en installant une boucle (euroloop), équivalent d’une balise, mais longeant la ligne sur une certaine distance.
Les données de signalisation sont transmises de manière permanente, via le réseau GSM-R. Le train communique constamment sa position (qu’il détermine avec un odomètre) au centre de contrôle qui lui communique en retour les actions à effectuer (vitesse, arrêt, etc.).
Des eurobalises sont toujours présentes sur la voie pour recaler éventuellement l’odométrie embarquée.
Un système de détection des trains au sol s’appuie sur l’existence des circuits de voie pour localiser un train aval sur un canton. Cette information est transmise au radio block center (RBC) qui gère ensuite l’espacement entre deux circulations. Le train suiveur reçoit une nouvelle autorisation de circulation par l’intermédiaire de la liaison radio GSM-R. Dès que le train aval libère un canton le poste central de commande reçoit l’information correspondante du sol qui est transmise par liaison radio au train suiveur.
Le niveau 2 rend disponible quasi immédiatement une information « libératoire » pour le train suiveur et contribue ainsi à augmenter la fluidité. Cette immédiateté est la différence par rapport à la signalisation conventionnelle, où une demi-minute est parfois nécessaire pour libérer un aiguillage alors que le train est déjà bien loin.
Les modes techniques utilisés sur le RFN sont :
Mode FS : Conduite en supervision complète.
Toutes les données train et voie sont disponibles à bord.
Le DMI affiche :
Le système « bord » supervise la vitesse, le déplacement du train, le respect de l’EOA matérialisé par un repère d’arrêt ETCS, un signal d’arrêt ou un heurtoir en ETCS1.
Mode OS : Conduite en marche à vue.
Toutes les données train et voie sont disponibles à bord sauf l’assurance de la libération de toute ou partie de la voie allouée au train.
Le DMI affiche les mêmes indications qu’en mode FS.
Le système « bord » assure également la supervision comme en mode FS.
Mode SR : Conduite sous la responsabilité des agents.
Ce mode technique est utilisé pour les situations dégradées et la procédure « Mise en service » lorsque le bord n’a pas reçu d’allocation de voie. Le système « bord » ne supervise que la vitesse du mode SR et le franchissement des repères d’arrêt ETCS et des signaux d’arrêt.
Mode SH : Circulation en manœuvre.
Ce mode technique est sélectionné par le conducteur pour les mouvements de manœuvre. Le système « bord » ne supervise que la vitesse du train.
Mode NL : Conduite d’un engin moteur non en tête du mouvement
Ce mode technique est utilisé en cas de pousse ou de double traction.
En mode FS, une vitesse autorisée affichée sans la présentation de l’EOA signifie « marche normale ».
La MA constituée d’un ou plusieurs cantons est allouée canton par canton, par ajout successif d’un canton. Si le canton en aval du dernier canton alloué est occupé le train doit être en mesure de s’arrêter avant l’entrée de ce canton. Le conducteur est alors avisé par une indication sonore au DMI.
Dès lors, les indications de conduite (vitesse but égale à 0 et une distance but) permettant de respecter la courbe de freinage sont affichées.
Le conducteur doit ralentir de façon à être en mesure de s’arrêter avant l’EOA, tout en respectant la vitesse autorisée.