Version imprimable multipages. Cliquer ici pour imprimer.
Modèles
1 - Catégories de matériels roulants
Les catégories sont des regroupements de matériel roulant, soit par leurs caractéristiques, leurs performances ou par la nature des dessertes pour lesquelles ils ont été conçus ou sont utilisés.
Un même matériel roulant peut être utilisé pour différents types de circulation, et de desserte. Ce caractère versatile est contenu dans les attributs :
primary_category(requis) indique l’utilisation principale d’un matériel roulantother_categories(optionnel) indique les autres utilisations d’un matériel roulant
La catégorie principale d’un matériel roulant permet plusieurs fonctionnalités, comme le filtrage, un affichage différencié sur les graphiques ou réticulaire, et plus globalement, d’agréger des matériels roulants.
Catégories de matériels roulants
Les différentes catégories de matériel roulant disponibles par défaut sont les suivantes :
Train à grande vitesse(voir Train à grande vitesse)Train interurbain(voir InterCity)Train régional(voir Regional train)Train suburbain(voir Train de banlieue)Train de fret(voir Train de fret)Train de fret rapide(pareil que Train de fret, mais avec un code de composition différent,ME140au lieu deMA100par exemple)Train de nuit(voir Train de nuit)Tram-train(voir Tram-train)Train touristique(voir Chemin de fer touristique)Train de travaux(voir Train de travaux)
Il est aussi prévu que, plus tard, un utilisateur puisse créer directement de nouvelles catégories de matériel roulant.
Matériels roulants réalistes open data
Afin de rendre l’application plus accessible aux utilisateurs en dehors de l’industrie ferroviaire, tels que des contributeurs externes et des laboratoires de recherche, et de préparer la sortie de la version publique “bac à sable” d’OSRD, plusieurs matériels roulants créés avec des données fictives sont disponibles pour tous les utilisateurs.
Ces matériels roulants ont été conçus pour couvrir la majorité des scénarios de simulation que les utilisateurs pourraient rencontrer.
Ces matériels roulants ne sont pas des matériels roulants existant réellement en raison de la confidentialité des données, mais ils s’en inspirent pour garantir le réalisme des simulations.
Ces matériels roulants sont fournis sous forme de fichiers JSON. Nous avons créé un matériel roulant représentatif de chaque catégorie présentée ci-dessus.
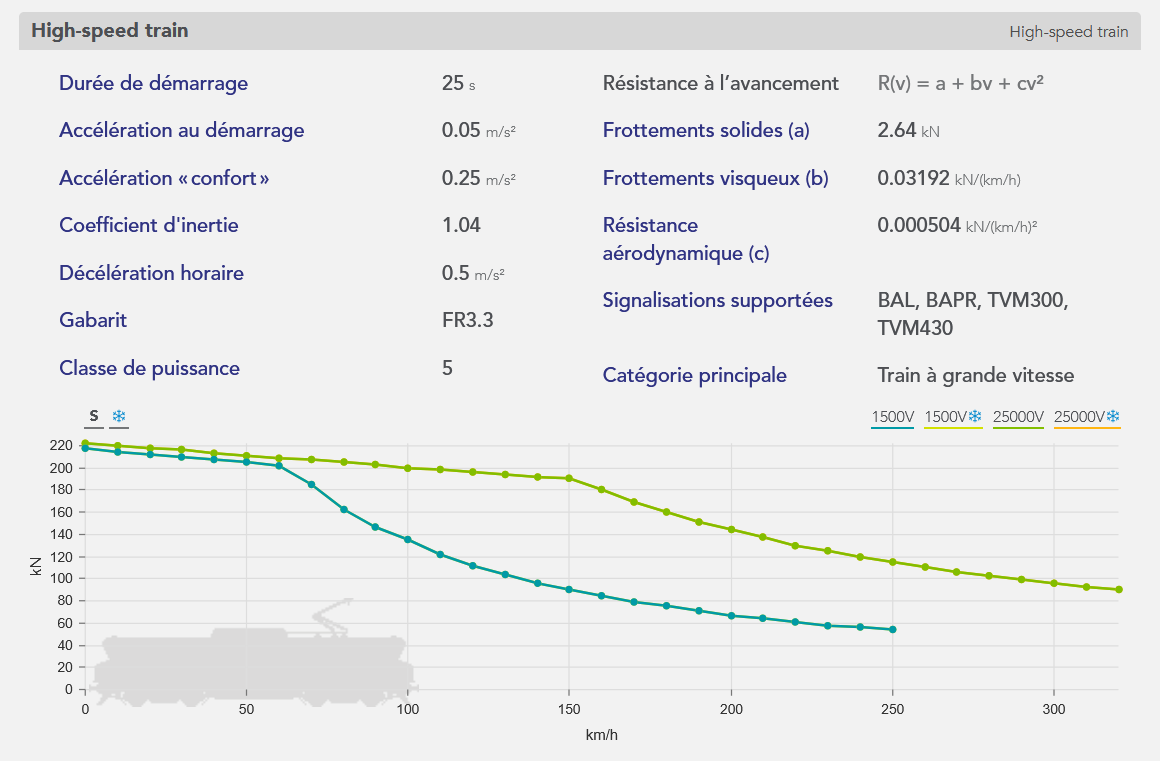
Les caractéristiques de ces matériels roulants ont été calculées à partir des valeurs moyennes des matériels roulants réels de chaque catégorie. De plus, la plupart de ces modèles ont été conçus pour être compatibles avec divers réseaux : ils sont principalement bi-modes (supportant plusieurs tensions et courants d’alimentation), ce qui n’est pas toujours le cas des matériels roulants réels.
Un exemple de matériel roulant, un train à grande vitesse, est représenté ci-dessous, depuis l’éditeur de matériel roulant de l’application :
Open data
Puisque ces matériels roulants sont fictifs (mais réalistes), ils peuvent être librement utilisés dans des projets en dehors d’OSRD.
Pour y avoir accès et les utiliser dans l’application :
Depuis l’application open-source “bac à sable” : Les matériels roulants sont disponibles par défaut.
Depuis une application lancée localement : Utilisez la commande associée dans le README pour importer les matériels roulants de test dans votre base de données.
./scripts/load-railjson-rolling-stock.sh tests/data/rolling_stocks/realistic/*.json
2 - Exemple d'infrastructure
Introduction
Cette page donne un exemple de la manière dont les formats de données sont utilisés pour décrire une infrastructure dans OSRD.
À cette fin, prenons comme exemple l’infrastructure-jouet suivante :

Conseil
Pour zoomer sur un diagramme, cliquez sur le bouton d’édition qui apparaît au survol de celui-ci.Ce diagramme est un aperçu de l’infrastructure avec les lignes et les stations uniquement.
Cette infrastructure ne se veut pas réaliste, mais plutôt destinée à illustrer le modèle de données d’OSRD. Cet exemple sera créé étape par étape et expliqué en cours de route.
Le générateur d’infrastructures
Dans le dépôt OSRD se trouve une bibliothèque python conçue pour aider à générer des infrastructures dans un format compris par OSRD.
L’infrastructure discutée dans cette section peut être générée grâce au fichier small_infra.py. Pour en savoir plus sur les scripts de génération, vous pouvez consulter le README correspondant.
Voies
Sections de voie (Track Sections)
Les premiers objets que nous devons définir sont les TrackSections. La plupart des autres objets sont positionnés par rapport à celles-ci.
Une section de voie est une section de rail (sans aiguillages). On peut choisir de diviser les voies de son infrastructure en autant de sections qu’on le souhaite. Ici, nous avons choisi d’utiliser les sections de voie les plus longues possibles, ce qui signifie qu’entre deux aiguillages, il y a toujours une seule section de voie.
Les sections de voie sont ce sur quoi les trains simulés roulent. Ils sont l’équivalent abstrait des sections de rails physiques. Les sections de voie sont bidirectionnelles.
Dans cet exemple, nous définissons deux voies pour la ligne entre les stations Ouest et Nord-Est. Nous avons également des voies de contournement aux stations Nord et Centre-Ouest pour plus de réalisme. Enfin, nous avons trois voies distinctes dans la station Ouest, puisqu’il s’agit d’une plaque tournante majeure dans notre infrastructure imaginaire.

Important
Les TrackSections sont représentées par des flèches dans ce diagramme pour souligner le fait qu’elles ont un début et une fin. C’est important car les objets positionnés sur les sections de voie sont localisés en fonction de leur distance par rapport au début de leur section de voie.
Par conséquent, pour placer un objet au début de sa section de voie, définissez sa position à 0. Pour le déplacer à la fin de sa section de voie, définissez sa position à la length de la section de voie.
Ces attributs sont nécessaires pour que la section de voie soit complète :
length: la longueur de la section de voie en mètres.geo: les coordonnées dans la réalité (geo pour géographique), au format GeoJSON.- attributs cosmétiques :
line_name,track_name,track_numberqui sont utilisés pour indiquer le nom et les étiquettes qui ont été donnés aux voies / lignes dans la réalité.
Pour toutes les sections de voies de notre infrastructure, les attributs geo se rapprochent beaucoup du schéma donné.
Pour la plupart des sections de voies, leur length est proportionnelle à ce que l’on peut voir sur le diagramme. Pour préserver la lisibilité, des exceptions ont été faites pour TA6, TA7, TD0 et TD1 (qui font 10km et 25km).
Nœud
Un Node représente un nœud dans l’infrastructure. Dans une simulation OSRD, un train ne peut passer d’une section de voie à une autre que si elles sont reliées par un nœud.
Un nœud peut se présenter de deux manières différentes :
1) Aiguillages
Les aiguillages peuvent être vus comme une collection de liens de sections de voies, partitionnés en groupes. Chaque groupe représente un état de l’aiguillage. Passer d’un groupe à un autre peut prendre du temps, et au maximum un lien peut être prêt à être utilisé à la fois.
Dans le monde réel, les aiguillages ne sont pas uniques, mais plutôt des instances de modèles existants.
2) Liens de sections de voies
Pour le moment, nous n’avons créé que des sections de voies, qui ne sont pas interconnectées (les données géospatiales ne sont pas utilisées pour déduire quelles voies sont connectées).
Les link sont utilisés pour connecter deux sections de voie ensemble, tout comme un joint de soudure le ferait dans la vie réelle. Dans une simulation OSRD, un train ne peut passer d’une section de voie à une autre que si elles sont reliées par ce type de nœud, le link (ou par un autre NodeType).
Que ce soit pour les aiguillages ou les liens de sections de voies, les liens et les groupes ne font pas partie du switch lui-même, mais d’un objet NodeType, qui est partagé par les aiguillages du même modèle.
Types de Nœud
Les NodeTypes ont deux attributs obligatoires :
ports: Une liste de noms de ports. Un port est une extrémité du nœud qui peut être connecté à une section de voie.groups: Un table de correspondance entre le nom des groupes et les listes de branches (connexion entre 2 ports) qui caractérisent les différentes positions possibles du type de nœud
À tout moment, tous les nœuds ont un groupe actif, et peuvent avoir une branche active, qui appartient toujours au groupe actif. Pendant une simulation, le changement de branche active à l’intérieur d’un groupe est instantané, mais le changement de branche active entre les groupes prend un temps configurable.
Ceci est dû au fait qu’un Nœud peut-être un objet physique (dans le cas des aiguillages), et que le changement de branche active peut impliquer le déplacement de certaines de ses parties. Les groups sont conçus pour représenter les différentes positions qu’un Nœud peut avoir. Chaque groupe contient les liens qui peuvent être utilisés dans la position du Nœud associé.
Dans le cas des aiguilles, la durée nécessaire pour changer de groupe est stockée à l’intérieur du Nœud, car elle peut varier en fonction de l’implémentation physique du modèle d’aiguillage.
Nos exemples utilisent actuellement cinq NodeTypes. Il est possible d’ajouter un type de nœud si nécessaire via le champ extended_node_type.
1) Le lien entre deux sections de voies
Celui-ci représente le lien entre deux sections de voies. Il possède deux ports : A et B.

Il permet de créer un lien entre deux sections de voies tel que définis dans OSRD. Ce n’est pas un objet physique.
2) L’aiguille
L’omniprésent aiguillage en Y, qui peut être considéré comme la fusion de deux voies ou la séparation d’une voie.
Ce type d’aiguillage possède trois ports : A, B1 et B2.

Il y a deux groupes, chacun avec une connexion dans leur liste : A_B1, qui connecte A à B1, et A_B2 qui connecte A à B2.
Ainsi, à tout moment (sauf lorsque l’aiguille bouge pour changer de groupe), un train peut aller de A à B1 ou de A à B2 mais jamais aux deux en même temps. Un train ne peut pas aller de B1 à B2.
Une aiguille n’a que deux positions :
- A vers B1
- A vers B2


3) L’aiguillage de croisement
Il s’agit simplement de deux voies qui se croisent.
Ce type a quatre ports : A1, B1, A2 et B2.

Il ne comporte qu’un seul groupe contenant deux connexions : A1 vers B1 et A2 vers B2. En effet, ce type d’aiguillage est passif : il n’a pas de pièces mobiles. Bien qu’il n’ait qu’un seul groupe, il est tout de même utilisé par la simulation pour faire respecter les réservations de route.
Voici les deux connexions différentes que ce type d’aiguillage possède :
- A1 vers B1
- A2 vers B2


4) L’aiguillage de croisement double
Celui-ci ressemble plus à deux aiguilles dos à dos. Il possède quatre ports : A1, A2, B1 et B2.

Cependant, il comporte quatre groupes, chacun avec une connexion. Les quatre connexions possibles sont les suivantes :
- A1 vers B1
- A1 vers B2
- A2 vers B1
- A2 vers B2




5) L’aiguillage de croisement simple
Celui-ci ressemble plus à un mélange entre une aiguille simple et un croisement. Il possède quatre ports : A1, A2, B1 et B2.

Voici les trois connexions que peut réaliser cet aiguillage :
- A1 vers B1
- A1 vers B2
- A2 vers B2



Retour aux nœuds
Un Node possède trois attributs :
node_type: l’identifiantNodeTypede ce nœud.ports: une correspondance entre les noms de port et les extrémités des sections de voie.group_change_delay: le temps qu’il faut pour changer le groupe de l’aiguillage qui est actif.
Les noms des ports doivent correspondre aux ports du type du nœud choisi. Les extrémités de la section de voie peuvent être début ou fin, faites attention à choisir les bonnes.
La plupart des nœuds de notre exemple sont des nœuds habituels. Le chemin de la gare du Nord à la gare du Sud a deux aiguillages de croisement. Enfin, il y a un aiguillage de croisement double juste avant que la ligne principale ne se divise en lignes Nord-Est et Sud-Est.

Il est important de noter que ces nœuds sont présents par défaut dans le code du projet. Seuls les extended_switch_type ajoutés par l’utilisateur apparaîtront dans le railjson.
Courbes et pentes
Les Courbes et les Pentes sont essentielles pour des simulations réalistes. Ces objets sont définis comme une plage entre une position de début (begin) et de fin (end) sur une section de voie. Si une courbe / pente s’étend sur plus d’une section de voie, elle doit être ajoutée à toutes les sections.
Les valeurs des courbes / pentes sont constantes sur toute leur étendue. Pour des courbes / pentes variables, il faut créer plusieurs objets.
Les valeurs de pente sont mesurées en mètres par kilomètres, et les valeurs de courbe sont mesurées en mètres (le rayon de la courbe).
begin doit toujours être inférieure à la valeur end. C’est pourquoi les valeurs de courbe/pente peuvent être négatives : une pente ascendante de 1 allant du décalage 10 à 0 est identique à une pente descendante de -1 allant des décalages 0 à 10.Dans le fichier small_infra.py, nous avons des pentes sur les sections de voie TA6, TA7, TD0 et TD1.
Il y a également des courbes sur les sections de voie TE0, TE1, TE3 et TF1.
Enclenchement
Jusqu’à présent, tous les objets ont contribué à la topologie (forme) des voies. La topologie serait suffisante pour que les trains puissent naviguer sur le réseau, mais pas assez pour le faire en toute sécurité. Pour assurer la sécurité, deux systèmes collaborent :
- L’enclenchement garantit que les trains sont autorisés à avancer
- La signalisation est le moyen par lequel l’enclenchement communique avec le train
Détecteurs
Ces objets sont utilisés pour créer des sections TVD (Track Vacancy Detection) : la zone de la voie située entre deux détecteurs est une section TVD. Lorsqu’un train rencontre un détecteur, la section dans laquelle il entre est occupée. La seule fonction des sections TVD est de localiser les trains.
Dans la réalité, les détecteurs peuvent être des compteurs d’essieux ou des circuits de voie par exemple.
Pour que cette méthode de localisation soit efficace, les détecteurs doivent être placés régulièrement le long de vos voies, pas trop nombreux pour des raisons de coût, mais pas trop peu, car les sections TVD seraient alors très grandes et les trains devraient être très éloignés les uns des autres pour être distingués, ce qui réduirait la capacité.
Il y a souvent des détecteurs à proximité de tous les extrémités des aiguillages. De cette façon, l’enclenchement est averti presque immédiatement lorsqu’un aiguillage est libéré, qui est alors libre d’être utilisé à nouveau.
Dans OSRD, les détecteurs sont des objets ponctuels. Les attributs dont ils ont besoin sont leur id et leur localisation sur la voie (track et offset).

Quelques notes :
- Entre certains points, nous n’avons ajouté qu’un seul détecteur (et non pas deux), car ils étaient très proches les uns des autres, et cela n’aurait eu aucun sens de créer une minuscule section TVD entre eux. Cette situation s’est produite sur des sections de voies (TA3, TA4, TA5, TF0 et TG3).
- Dans notre infrastructure, il y a relativement peu de sections de voie qui sont assez longues pour nécessiter plus de détecteurs que ceux liés aux aiguillages. Ce sont, TA6, TA7, TDO, TD1, TF1, TG1 et TH1. Par exemple, TD0, qui mesure 25 km, compte en fait 17 détecteurs au total.
Butoirs (BufferStops)
Les BufferStops sont des obstacles destinés à empêcher les trains de dérailler en bout des voies.
Dans notre infrastructure, il y a un butoir sur chaque section de voie qui est un cul-de-sac. Il y a donc 8 butoirs au total.
Avec les détecteurs, ils définissent les limites des sections TVD (voir Détecteurs).
Itinéraires (Routes)
Une Route est un itinéraire dans l’infrastructure. Un sillon est une séquence de routes. Les itinéraires sont utilisés pour réserver des sections de sillon avec l’enclenchement. Voir la documentation dédiée.
Il est représenté avec les attributs suivants :
entry_pointetexit_point: Références de détecteurs ou de butées qui marquent le début et la fin de l’itinéraire.entry_point_direction: Direction à prendre sur la section de voie depuisentry_pointpour commencer l’itinéraire.switches_direction: Un ensemble de directions à suivre lorsqu’on rencontre un aiguillage sur notre itinéraire, de manière à reconstituer cet itinéraire deentry_pointjusqu’àexit_point.release_detectors: Lorsqu’un train franchit un détecteur de libération, les ressources réservées depuis le début de la route jusqu’à ce détecteur sont libérées.
Signalisation
Grâce à l’enclenchement, les trains sont localisés et autorisés à se déplacer. C’est un bon début, mais c’est inutile tant que les trains n’en sont pas informés. C’est là que les “signaux” entrent en jeu : les signaux réagissent aux enclenchements et peuvent être vus par les trains.
La façon dont les trains réagissent aux signaux dépend de l’aspect, du type de signal et du système de signalisation.
Voici les attributs les plus importants des signaux :
linked_detector: Le détecteur lié.type_code: Le type de signal.direction: La direction qu’il protège, qui peut être simplement interprétée comme la façon dont il peut être vu par un train entrant (puisqu’il n’y a des feux que d’un côté…). La direction est relative à l’orientation de la section de voie.- Des attributs cosmétiques comme
angle_geoandsidequi contrôlent la manière dont les signaux sont affichés dans le front-end.
Voici une visualisation de comment on peut représenter un signal, et quelle direction il protège.

La manière dont les signaux sont disposés dépend fortement du système de signalisation et du gestionnaire de l’infrastructure.
Voici les règles de base utilisées pour cet exemple d’infrastructure :
- Nous ajoutons deux signaux d’espacement (un par direction) pour chaque détecteur qui découpe une longue section de TVD en plus petites sections.
- Les entrées d’aiguillage où un train pourrait devoir s’arrêter sont protégées par un signal (qui est situé à l’extérieur de la section TVD de l’aiguillage). Il doit être visible depuis la direction utilisée pour approcher l’aiguillage. Lorsqu’il y a plusieurs aiguillages dans une rangée, seul le premier a généralement besoin d’être protégé, car l’enclenchement est généralement conçu pour ne pas encourager les trains à s’arrêter au milieu des intersections.
Notez que les détecteurs liés à au moins un signal ne sont pas représentés, car il n’y a pas de signaux sans détecteurs associés dans cet exemple.
Pour obtenir le id d’un détecteur lié à un signal, prenez le id du signal et remplacez S par D (par exemple SA0 -> DA0).

Électrification
Pour permettre à des trains électriques de circuler sur notre infrastructure, nous devons spécifier les parties de celle-ci qui sont électrifiées.
Caténaires (Catenaries)
Les Catenaries représentent les câbles d’alimentation qui alimentent les trains électriques. Ils sont représentés avec les attributs suivants :
voltage: Une chaîne de caractères représentant le type d’alimentation électrique utilisée pour l’électrification.track_ranges: Une liste de portions de sections de voie (TrackRanges) couvertes par cette caténaire. UneTrackRangeest composée d’un identifiant de section de voie, d’une positionbeginet d’une positionend.
Dans notre exemple, nous avons deux Catenaries:
- Une avec
voltagedéfini sur"1500", qui couvre uniquement TA0. - Une avec
voltagedéfini sur"25000", qui couvre tous les autres sauf TD1.
Cela signifie que seuls les trains thermiques peuvent traverser la section de voie TD1.
Notre exemple montre également que, contrairement à son homologue réel, une seule Catenary peut couvrir toute l’infrastructure.
Sections Neutres (NeutralSections)
Dans certaines parties d’une infrastructure, les conducteurs de train sont sommés - principalement pour des raisons de sécurité - de couper l’alimentation électrique du train.
Pour représenter de telles parties, nous utilisons des NeutralSections. Elles sont représentées avec principalement les attributs suivants :
track_ranges: Une liste deDirectedTrackRanges(portions de sections de voie associées à une direction) couvertes par cette section neutre.lower_pantograph: Un booléen indiquant si le pantographe du train doit être abaissé pendant la traversée de cette section.
Dans notre exemple, nous avons trois NeutralSections : une à la jonction des caténaires "1500" et "25000", une sur TA6 et une sur TG1 et TG4.
Pour plus de détails sur le modèle, voir la page dédiée.
Divers
Points opérationnels (OperationalPoints)
Le point opérationnel est aussi connu sous le nom de Point Remarquable (PR).
Un OperationalPoint est une collection de points (OperationalPointParts) d’intérêt.
Par exemple, il peut être pratique (repère de conduite) de stocker l’emplacement des plateformes en tant que parties et de les regrouper par station dans des points opérationnels.
De la même manière, un pont au-dessus des voies sera un OperationalPoint, mais il comportera plusieurs OperationPointParts, une à l’intersection de chaque voie. Le champ local_track_name fournit un label lisible pour la voie dans le contexte d’un point opérationnel.
Dans l’exemple de l’infrastructure, nous n’avons utilisé que des points opérationnels pour représenter les stations. Les parties de points opérationnels sont représentées par des diamants violets. Gardez à l’esprit qu’un seul point opérationnel peut contenir plusieurs parties.

Limites de gabarit (Loading Gauge Limits)
Cet objet s’apparente aux Pentes et aux Courbes : il couvre une plage de section de voie, avec une position de début (begin) et de fin (end). Il représente une restriction sur les trains qui peuvent circuler sur la plage donnée, par poids ou par type de train (fret ou passagers).
Nous n’en avons pas mis dans nos exemples.
Sections de vitesse (SpeedSections)
Les SpeedSections représentent les limites de vitesse (en mètres par seconde) qui sont appliquées sur certaines parties des voies. Une SpeedSection peut s’étendre sur plusieurs sections de voie, et ne couvre pas nécessairement la totalité des sections de voie. Les sections de vitesse peuvent se chevaucher.
Dans notre exemple d’infrastructure, nous avons une section de vitesse couvrant l’ensemble de l’infrastructure, limitant la vitesse à 300 km/h. Sur une plus petite partie de l’infrastructure, nous avons appliqué des sections de vitesse plus restrictives.

3 - Zones neutres
Objet physique que l’on cherche à modéliser
Introduction
Pour qu’un train puisse circuler, il faut soit qu’il ait une source d’énergie à bord (fuel, batterie, hydrogène, …) soit qu’on l’alimente en énergie tout au long de son parcours.
Pour fournir cette énergie, des câbles électriques sont suspendus au dessus des voies: les caténaires. Le train assure ensuite un contact avec ces câbles grâce à un patin conducteur monté sur un bras mécanique: le pantographe.
Zones neutres
Avec ce système il est difficile d’assurer l’alimentation électrique d’un train en continu sur toute la longueur d’une ligne: sur certaines portions de voie, il est nécessaire de couper l’alimentation électrique du train. Ce sont ces portions que l’on appelle zones neutres.
En effet, pour éviter les pertes énergétiques le long des caténaires, le courant est fourni par plusieurs sous-stations réparties le long des voies. Deux portions de caténaires alimentées par des sous-stations différentes doivent être isolées électriquement pour éviter les courts-circuits.
Par ailleurs, la façon dont les voies sont électrifiées (courant continu ou non par exemple) peut changer selon les us locaux et l’époque d’installation. Il faut également isoler électriquement les portions de voies qui sont électrifiées différemment. Le train doit aussi (sauf cas particuliers) changer de pantographe lorsqu’il change de type d’électrification.
Dans ces deux cas on indique alors au conducteur de couper la traction du train, et parfois même d’en baisser le pantographe.
Dans l’infrastructure française, ces zones sont signalées par des panneaux d’annonce, d’exécution et de fin. Ces panneaux portent par ailleurs l’indication de baisser le pantographe ou non. Les portions de voies entre l’exécution et la fin peuvent ne pas être électrifiées entièrement, et même ne pas posséder de caténaire (dans ce cas la zone nécessite forcément de baisser le pantographe).
Parfois, des pancartes REV (pour réversible) sont placées en aval des panneaux de fin de zone. Elles sont destinées aux trains qui circulent avec un pantographe à l’arrière du train. Ces pancartes indiquent que le conducteur peut reprendre la traction en toute sécurité.
Par ailleurs il peut parfois être impossible sur une courte portion de voie de placer une caténaire ou bien de lever le pantographe du train. Dans ce cas la ligne est tout de même considérée électrifiée, et la zone sans électrification (passage sous un pont par exemple) est considérée comme une zone neutre.
Matériel roulant
Après avoir traversé une zone neutre, un train doit reprendre la traction. Ce n’est pas immédiat (quelques secondes), et la durée nécessaire dépend du matériel roulant.
Il doit également, le cas échéant, relever son pantographe, ce qui prend également du temps (quelques dizaines de secondes) et dépend également du matériel roulant.
Ainsi la marche sur l’erre imposée au train s’étend en dehors de la zone neutre, puisque ces temps systèmes sont à décompter à partir de la fin de la zone neutre.
Modèle de données
Nous avons choisi de modéliser les zones neutres comme l’espace entre les panneaux liés à celle-ci (et non pas comme la zone précise où il n’y a pas de caténaire ou bien où la caténaire n’est pas électrifiée).
Cette zone est directionnelle, i.e. associée à un sens de circulation, pour pouvoir prendre en compte des placements de panneaux différents selon le sens. Le panneau d’exécution d’un sens donné n’est pas nécessairement placé à la même position que le panneau de fin de zone du sens opposé.
Pour une voie à double sens, une zone neutre est donc représentée par deux objets.
Le schema est le suivant
{
"lower_pantograph": boolean,
"track_ranges": [
{
"track": string,
"start": number,
"end": number,
"direction": enum
}
],
"announcement_track_ranges": [
{
"track": string,
"start": number,
"end": number,
"direction": enum
}
]
}
lower_pantograph: indique si le pantographe doit être baissé dans cette zonetrack_ranges: liste des portions de voie où le train ne doit pas tractionnerannouncement_track_ranges: liste des portions de voie entre le panneau d’annonce et le panneau d’exécution
Affichage
Cartographie
Les zones affichées dans la cartographie correspondent aux track_ranges, donc entre les panneaux d’exécution et de fin de zone. La couleur de la zone indique si le train doit baisser son pantographe dans la zone ou non.
La direction dans laquelle la zone s’applique n’est pas représentée.
Résultat de simulation
Dans l’affichage linéaire, c’est toujours la zone entre EXE et FIN qui est affichée.
Recherche d’itinéraire
Les zones neutres sont donc des portions de voie “non électrifiées” où un train électrique peut tout de même circuler (mais où il ne peut pas tractionner).
Lors de la recherche de chemin dans l’infrastructure, une portion de voie qui n’est pas couverte par les track_ranges d’un objet caténaire (documentation à écrire) peut être empruntée par un train électrique seulement si elle est couverte par les track_ranges d’une zone neutre.
Simulation
Dans la simulation, nous approximons le comportement du conducteur de la façon suivante :
- La marche sur l’erre est entamée dès que la tête du train passe le panneau d’annonce
- Le décompte des temps systèmes (relevé du pantographe et reprise de la traction) commence dès que la tête du train passe le panneau de fin.
Dans la simulation actuelle, il est plus facile de manier des bornes d’intégration spatiales que temporelles. Nous effectuons l’approximation suivante: lors de la sortie de la zone neutre, on multiplie les temps systèmes par la vitesse en sortie de zone. La marche sur l’erre est alors prolongée de la distance obtenue. Cette approximation est raisonnable car l’inertie du train et la quasi-absence de frottement garantissent que la vitesse varie peu sur cet intervalle de temps.
Potentielles améliorations
Plusieurs points pourraient être améliorés :
- On ne considère pas les pancartes REV, tous les trains ne possèdent donc qu’un pantographe à l’avant dans nos simulations.
- Les temps systèmes sont approximés.
- Le comportement conducteur est plutôt restrictif (la marche sur l’erre pourrait commencer après le panneau d’annonce).
- L’affichage des zones est limité: pas de représentation de la direction ou des zones d’annonce.
- Ces zones ne sont pas éditables.