This wiki is meant to help software engineers have a deep understanding of railway systems.
It can only happen if content is added as needed. If something is missing, contribute!
This is the multi-page printable view of this section. Click here to print.
This wiki is meant to help software engineers have a deep understanding of railway systems.
It can only happen if content is added as needed. If something is missing, contribute!
Please open an issue if you’re missing a word
This section is dedicated to describing the general principles relating to:
The majority of the information in this section is taken from the educational document published by the Établissement Public de Sécurité Ferroviaire (EPSF, a public institution responsible for ensuring the safety of railways in France) published on July 5, 2017.
Not translated: please select another language
Not translated: please select another language
Not translated: please select another language
Not translated: please select another language.
Not translated: please select another language.
Not translated: please select another language
Not translated: please select another language.
The onboard computer of ETCS-enabled trains has to compute a number of position / speed curves. Here is how it works:
In order to compute any of these curves, a number of things are needed:
T_traction_cutoff: the time it take to cut off tractionA_brake_emergency is the expected emergency braking capability, without safety marginsA_brake_safe is the emergency braking coefficient, with safety marginsA_brake_service is the expected service braking capability, without safety marginsEOA end of movement authority: the location until which the train is allowed to moveSvL supervised location: the protected locationSBD supervised braking deceleration: intermediary result computed from EOA and A_brake_serviceEBD emergency braking deceleration: intermediary result computed from SvL and A_brake_safeAll the curves below are cut below a given release speed:
EBI (emergency break intervention) computed from EBD, shifted in position and space given rolling stock metadataSBI1 computed from SBD, shifted in time with Tbs1SBI2 computed from SBD, shifted in time with Tbs2FLOI (also called SBI, the intervention curve) the minimum of SBI1 and SBI2WARNING (warning curve) computed as a shift of FLOI by TwarningPS (permitted speed curve): shift of WARNING by time TdriverINDICATION is a shift of PS by time TindicationThe Ks-system (Ks = Kombinationssignal; engl: combination signal) is a german signalling system introduced in 1994 by Deutsche Bahn (DB) in order to create a common system for East Germany (Hl-System) and West Germany (H/V-System) after the german reunification.
The following paragraphs are mainly based on Pachl(2024), Railway Signalling Principles, Edition 3.0, p.20-30.
Railway lines are segmented into sequential block sections, each designed to be occupied by only one train at a time to ensure operational safety. To maintain a safe distance between two trains, the separation must account for the following components:
Block sections are delineated by main signals, which regulate train entry based on specific safety conditions. A signal may only be cleared for a train to enter a block section if all of the following criteria are met:
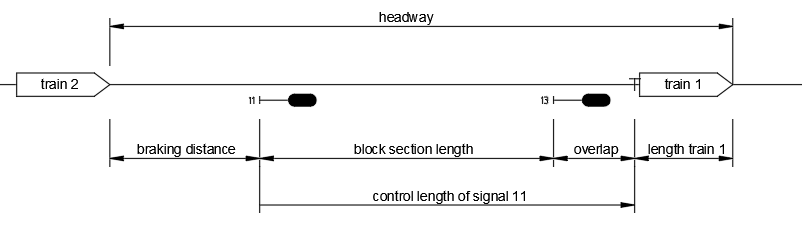
The control length of a signal refers to the section of track beyond the signal that must be verified as clear and safe before the signal can be set to proceed.
The overlap - a predefined safety margin - extends beyond the actual block section. Its primary function is to provide additional protection in the event that a train fails to stop at a signal displaying “stop”. The overlap begins at the destination signal and ends at a prominent point. Depending on the speed at which the train approaches the stop signal, different lengths of overlaps must be provided. The length of the overlap is monitored by track vacancy detection systems like axle counters.
| speed [km/h] | overlap [m] |
|---|---|
| 60 < v <= 160 | 200 |
| 40 < v <= 60 | 100 |
| v <= 40 | 50 |
A signal must remain at “stop” until the entire control length ahead is confirmed to be unobstructed. The clearing point for a signal corresponds to the end of the control length associated with the signal located behind it.
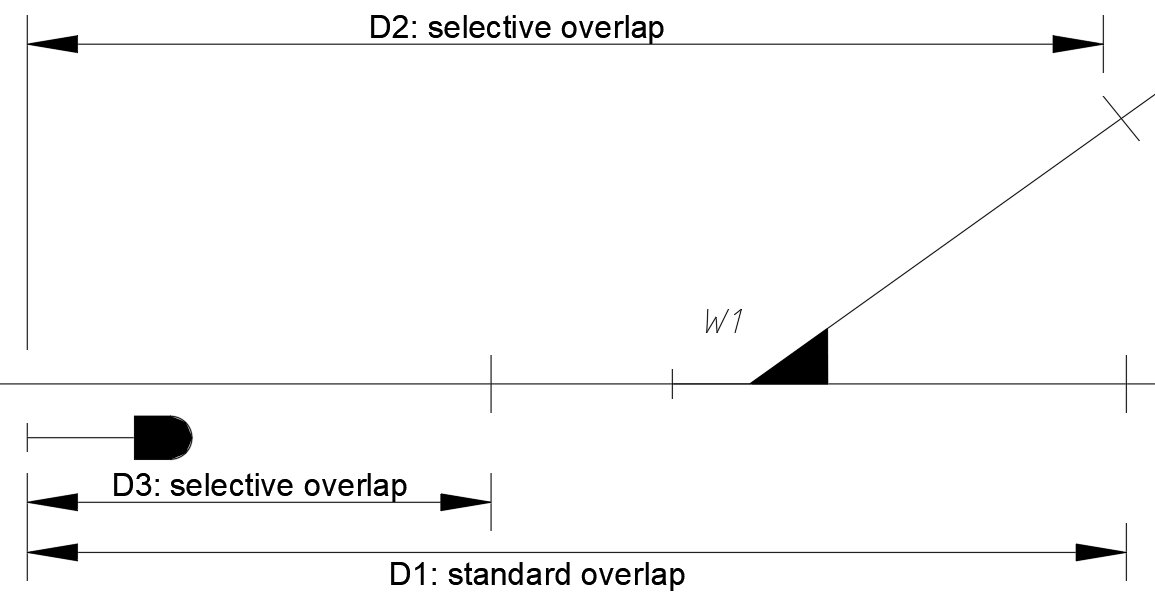
When selective overlaps are available (only at station’s exit signals and station’s intermediate signals) different overlap options can be chosen during route setting. These alternatives may vary in length or lead into different track sections.
Once the signal has been cleared, the selected overlap cannot be changed without first cancelling the route.
If a shorter-than-standard overlap is selected, the signalling system will reduce the train’s speed accordingly.
based on: DB AG, Ril 819.0202 Signale für Zug- und Rangierfahrten
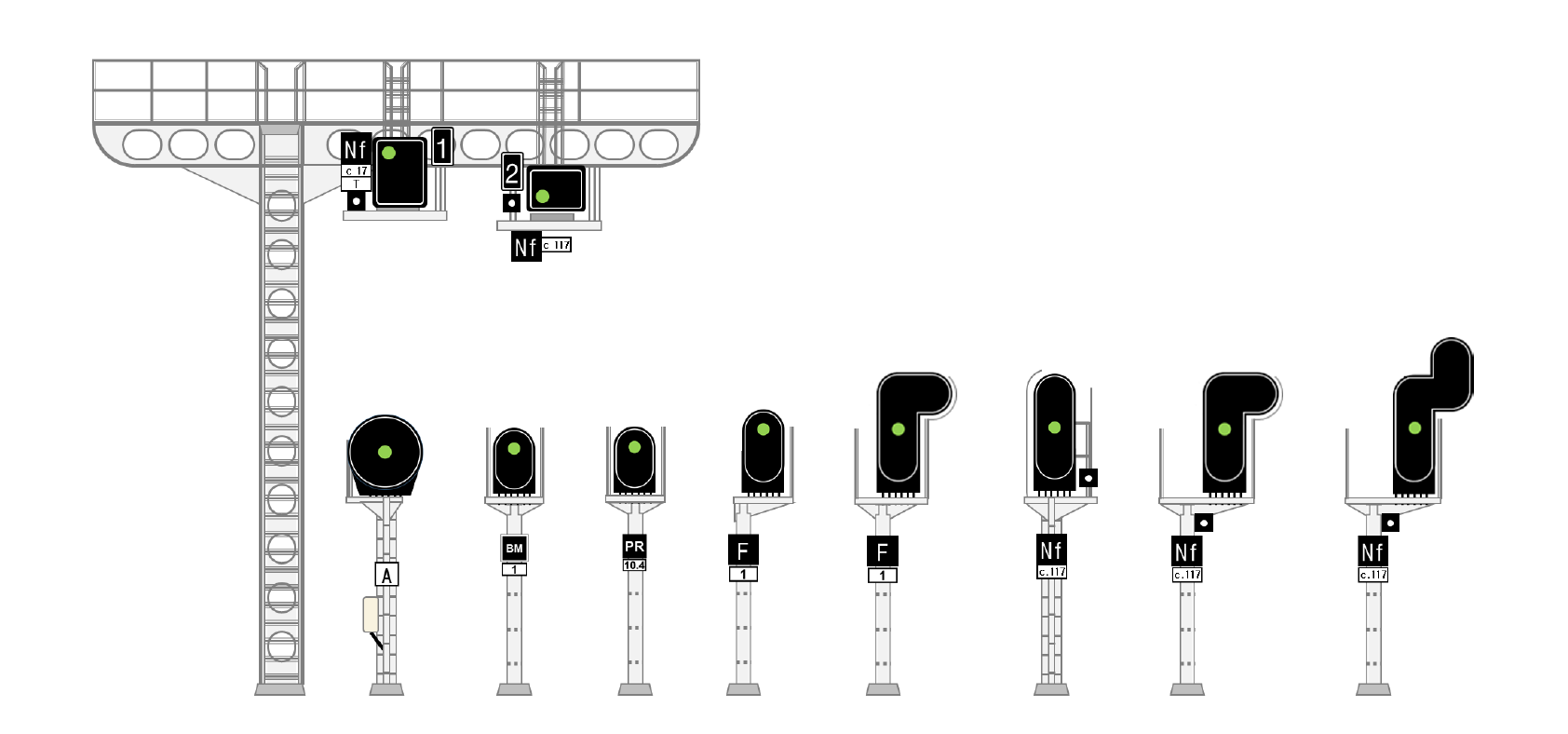
The Ks-signalling system utilizes a set of standardized signal aspects to convey operational instructions to train drivers. The primary signal indications include:
Within the Ks-system two signalling modes are implemented:
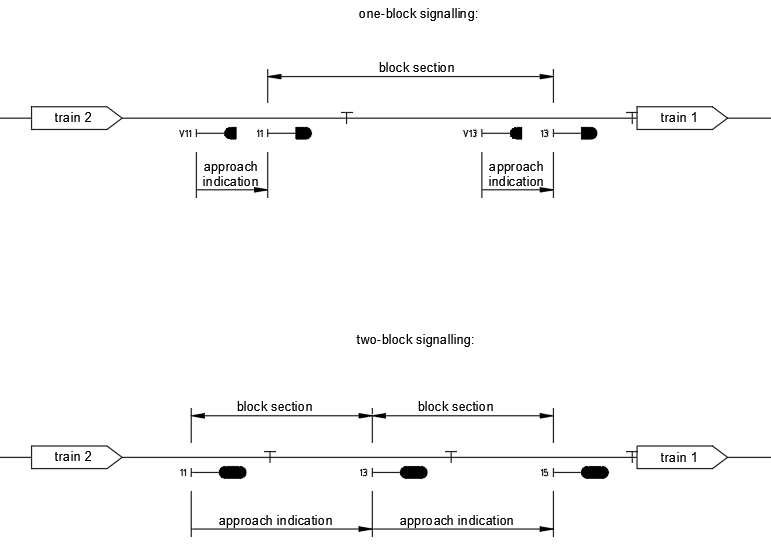
To ensure undisrupted train movement, a signal must be cleared before the approaching train reaches a point where it would otherwise need to initiate braking due to the aspect of the preceding signal.
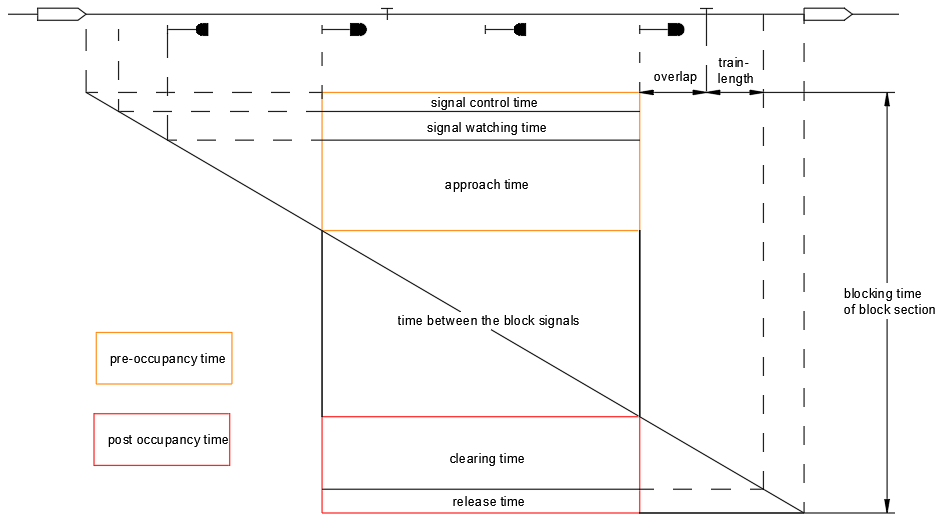
The minimum headway between two successive trains is determined by the blocking time, which defines the time interval during which a block section is exclusively reserved for a single train and thus unavailable to others.
This model is applicable not only to conventional signalling systems but also to cabin (cab) signalling systems such as LZB and ETCS.
The blocking time is composed of several distinct components:

Ks-signal in Braunschweig main station, Source: Dominik Wefering
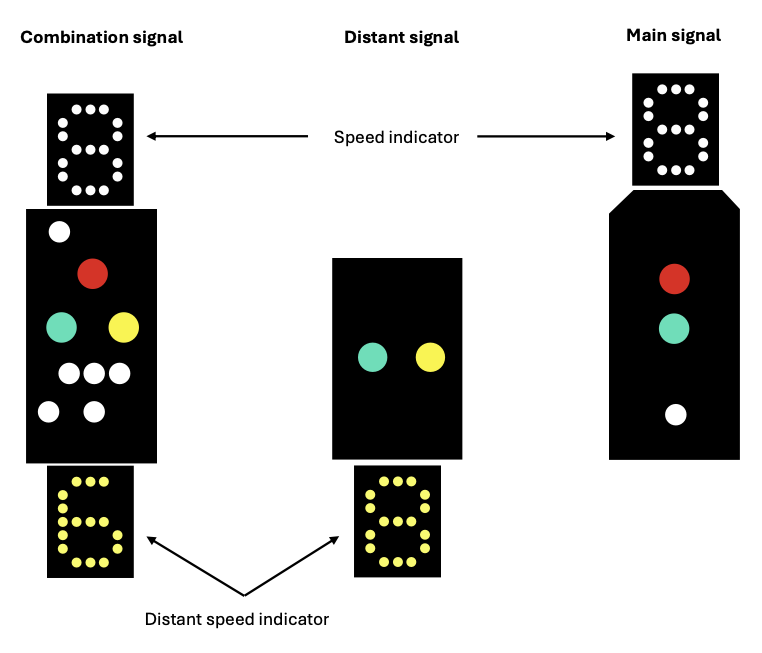
| Description | Aspect | Meaning |
|---|---|---|
| Combination signal | 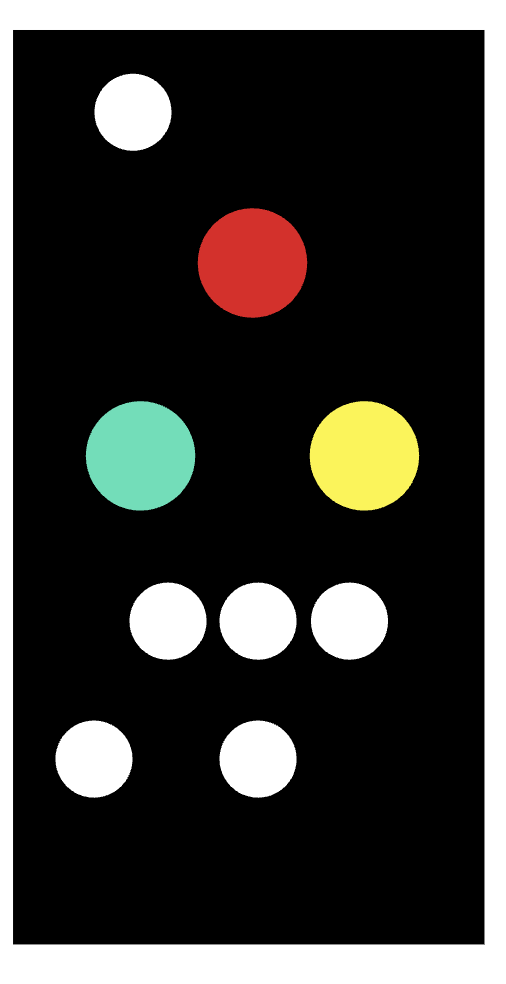 | combination signals have the function of both main signal and distant signal |
| main signal | 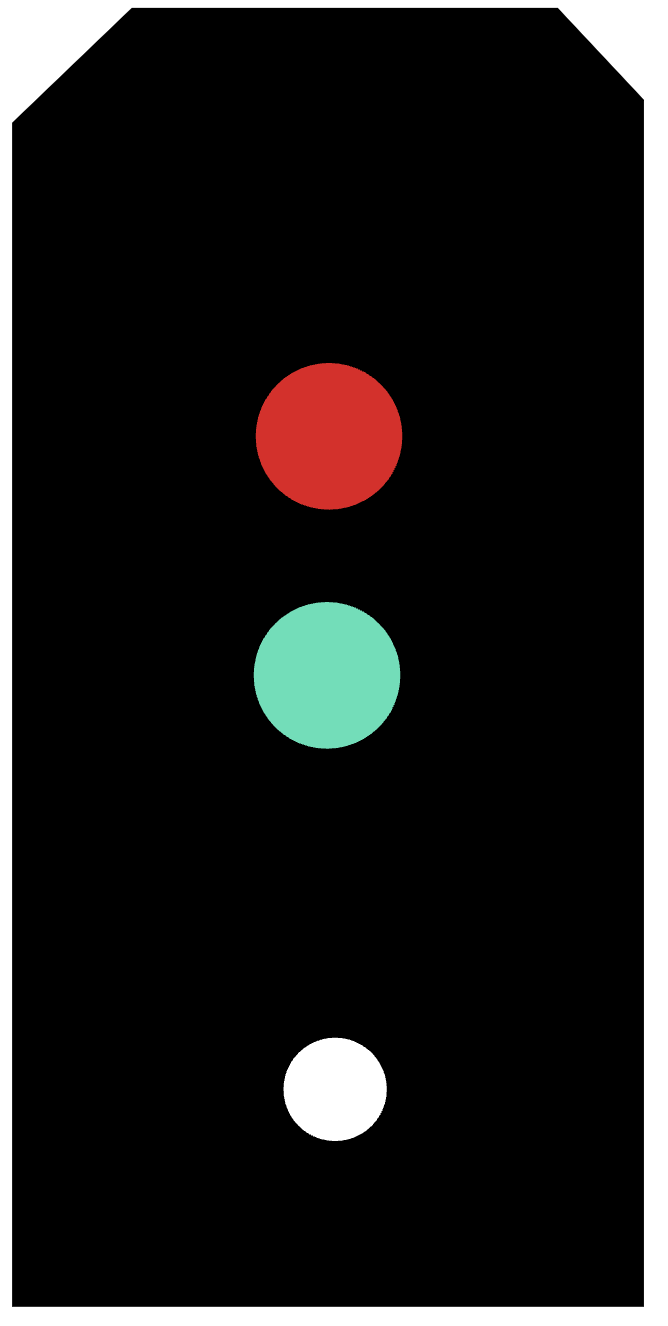 | main signals indicate whether the track section ahead may be run over |
| distant signal | 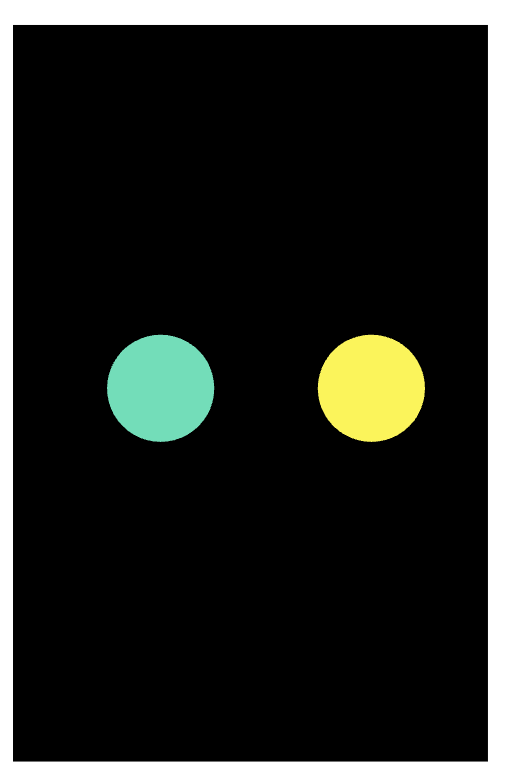 | Distant signals indicate which signal aspect is to be expected at the corresponding next main signal.These are positioned at the braking distance from the next main signal |
| Stop (Hp 0) | 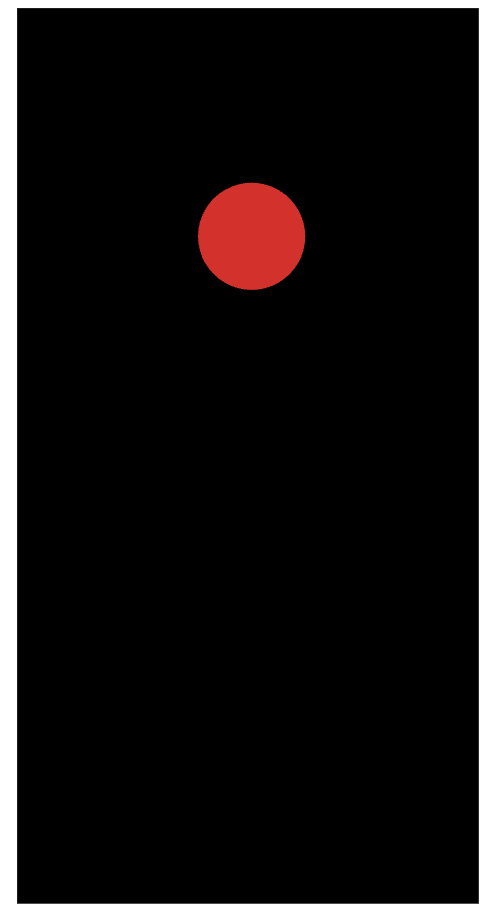 | the signal prohibits the passing of a train |
| Clear (Ks 1) | 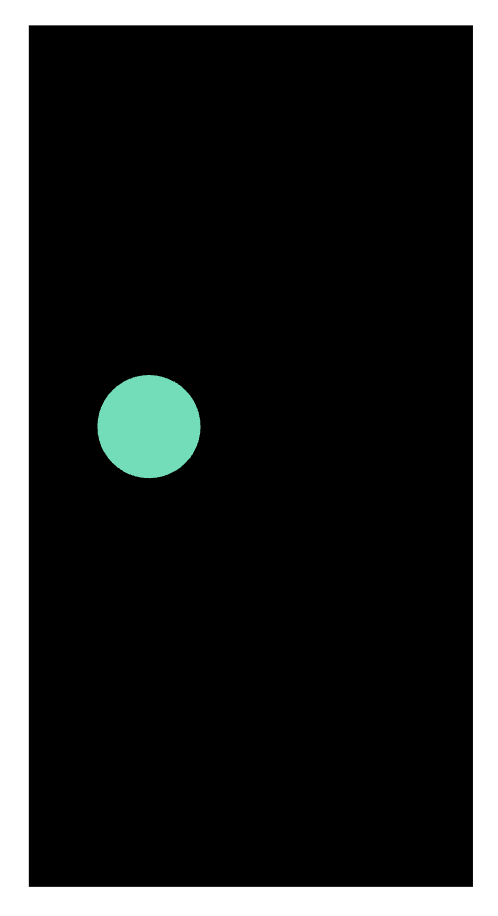 | 1. The signal permits the passing at the maximum speed allowed on the section, unless a speed restriction is indicated by a speed indicator.2. The green luminous spot blinks if a distant speed indicator shows in the signal, indicating a speed restriction at the next main signal |
| Expect Stop (Ks 2) |  | the signal permits the passing and indicates a stop at the next main signal |
based on: Bailey(1995), European Railway Signalling, p58; sprites from https://github.com/Nakaner/railway-signals.git
The Ks system includes specific indicators to communicate speed restrictions to train drivers.
Source: DB AG, Ril 301 Signalbuch
| Aspect | Form | Light | Corresponding speed-limit |
|---|---|---|---|
| Zs 3 |  |  | 80 km/h from this signal |
| Zs 3v |  |  | 80 km/h from the corresponding main signal |
sprites from https://github.com/Nakaner/railway-signals.git
The Linienförmige Zugbeeinflussung (LZB) is a continuous automatic train control system used to ensure safe and efficient operation at high speeds. Unlike the Punktförmige Zugbeeinflussung (PZB) (see PZB), which transmits discrete signal information at fixed track points, the LZB enables continuous bi-directional data exchange between the train and the trackside control center. This allows for real-time supervision of speed and position and forms the basis for cabin signalling at speeds exceeding 160 km/h.
The LZB consists of three main components (DB, 2019):
Trackside Equipment
The track contains cable loops laid between the rails, divided into multiple segments.
These loops enable continuous communication between the train and the LZB control center.
Source: Pachl (2022)
Train Equipment
Each LZB-equipped vehicle has an onboard unit that:
LZB Control Center
The control center transmits Movement Authorities (MAs) to the trains within the controlled area, defining:
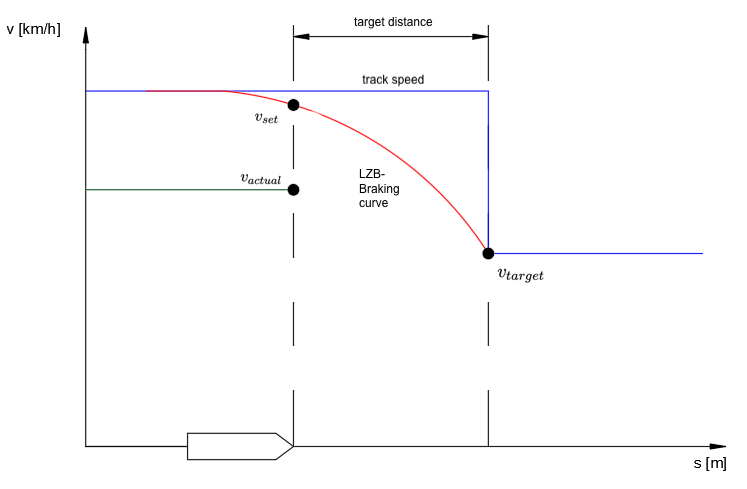
During operation, the train continuously reports its position to the LZB center. In return, it receives updated target data like setpoint speed (\(v_{set}\)), target speed (\(v_{target}\)) and target distance.
based on: Pachl (2022)
The onboard unit calculates braking curves for different supervision thresholds:
The braking curve that is set by the onboard unit is based on:
The next target point is displayed up to 10.000 m in front of the train. The speed limit equals the maximum track speed or the maximum possible speed of the train itself. (Murr, 1991)
For LZB there exist twelve braking curves with values between 0,115 und 1,10 m/s². The value of the emergency braking curve is about 40% higher than the permitted speed curve.
The deceleration of the individual braking curves remains constant across the entire speed range.
| Braking Curve Nr (BRN) | A | B | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Emergency Braking Curve [m/s²] | 0,115 | 0,2 | 0,29 | 0,375 | 0,460 | 0,545 | 0,63 | 0,715 | 0,8 | 0,9 | 1,0 | 1,1 |
| Permitted Speed Curve [m/s²] | 0,08 | 0,14 | 0,21 | 0,27 | 0,33 | 0,39 | 0,45 | 0,51 | 0,57 | 0,64 | 0,71 | 0,79 |
based on: Braun (1988)
The illustration below shows the braking curves for BRN 6 as an example.
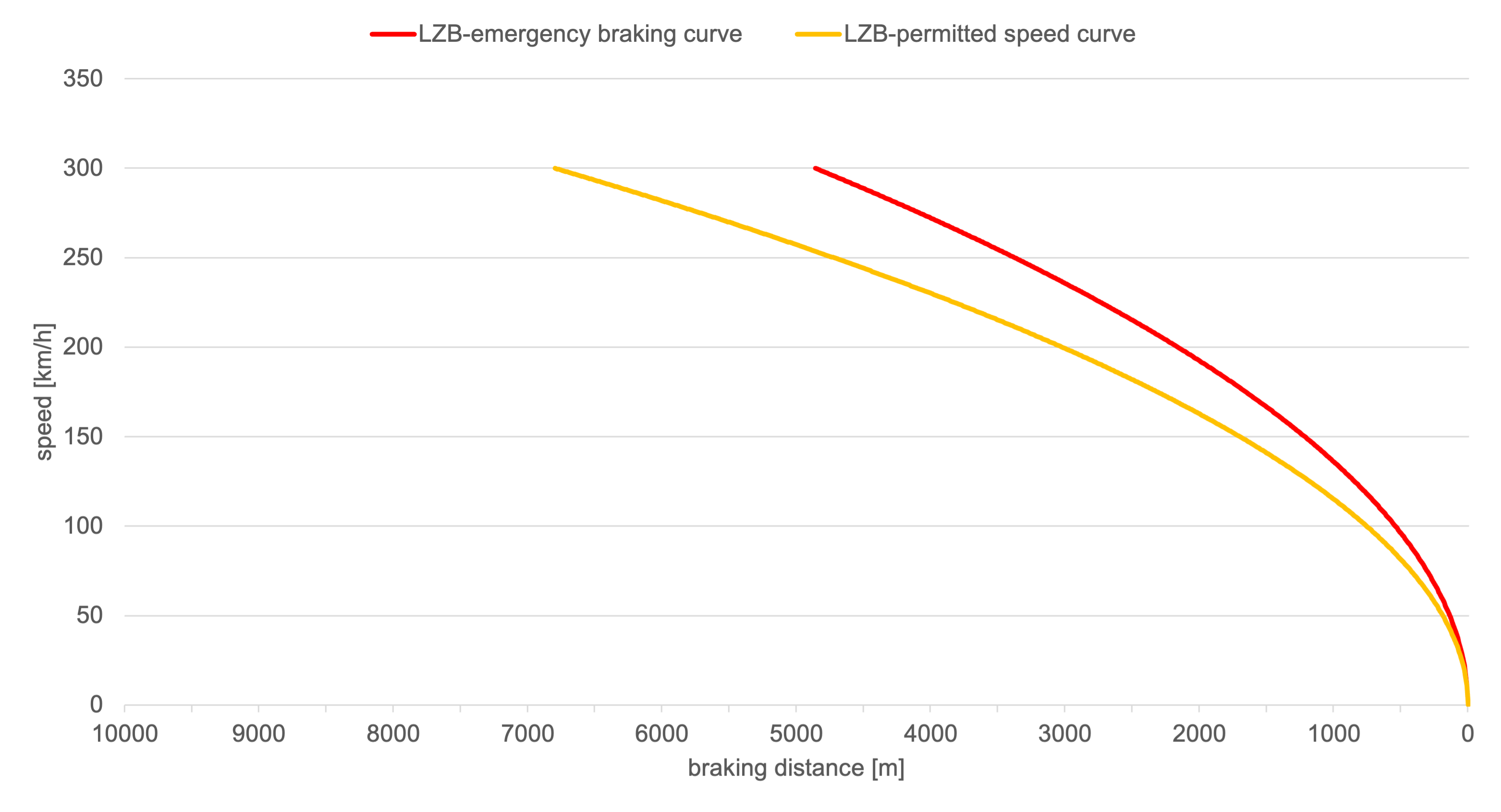
The train driver enters the permissible speed and the brake percentage into the vehicle device. The gradient is specified for the route. The LZB uses this data to set the necessary braking curve. (Braun, 1988)
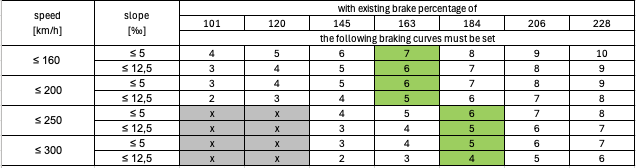
For Passenger trains the following curves must be set:
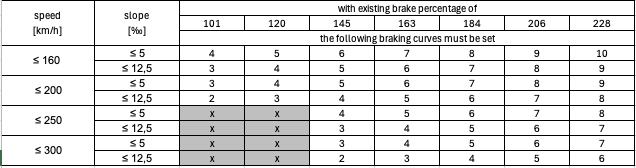
based on: Braun (1988)
For freight trains the following curves must be set:

based on: Braun (1991)
Where an “x” is written the combination of braking percentage and speed must not be possible.
The LZB can operate in two different control modes: Full Block Mode (german: Ganzblockmodus) and Partial Block Mode (german: Teilblockmodus). Both modes determine how the track is divided into supervised sections and how the control center grants Movement Authorities (MAs) to trains.
In Full Block Mode, each train occupies an entire block section, similar to traditional fixed-block signalling systems. A new train is only allowed to enter a block once the preceding train has completely cleared it. This mode ensures maximum safety but limits the line capacity. (Pachl, 2022)
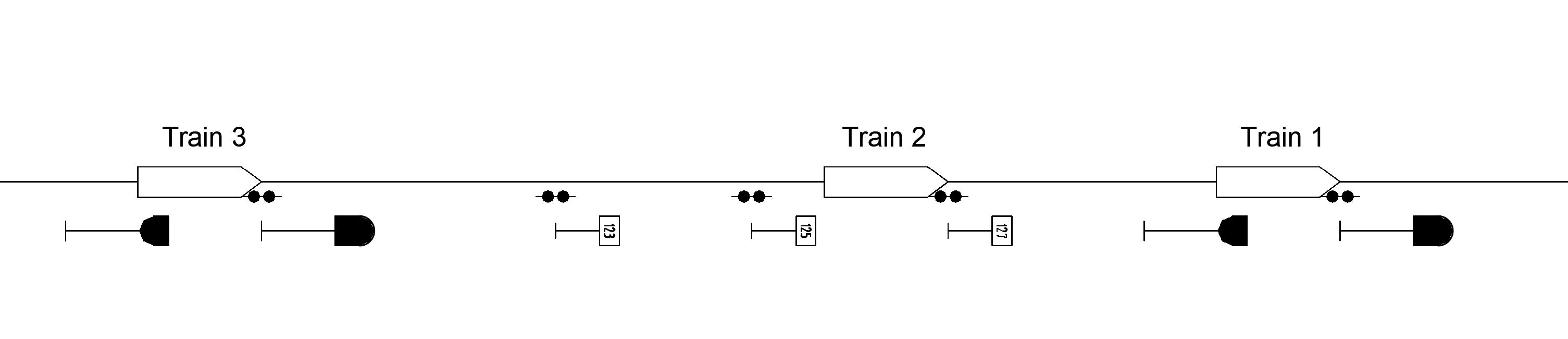
In Partial Block Mode, the LZB subdivides a block into several smaller LZB subsections. Each subsection can be individually monitored and released as the train progresses, allowing the following train to enter the same block earlier. This dynamic release mechanism increases line capacity significantly while maintaining safe separation between trains. (Pachl, 2022) The partial block principle thus enables higher traffic density and shorter headways, which are especially important for high-speed or high-frequency railway operations. The typical length of a LZB subsection is about 1200 m (Busse, 2021)
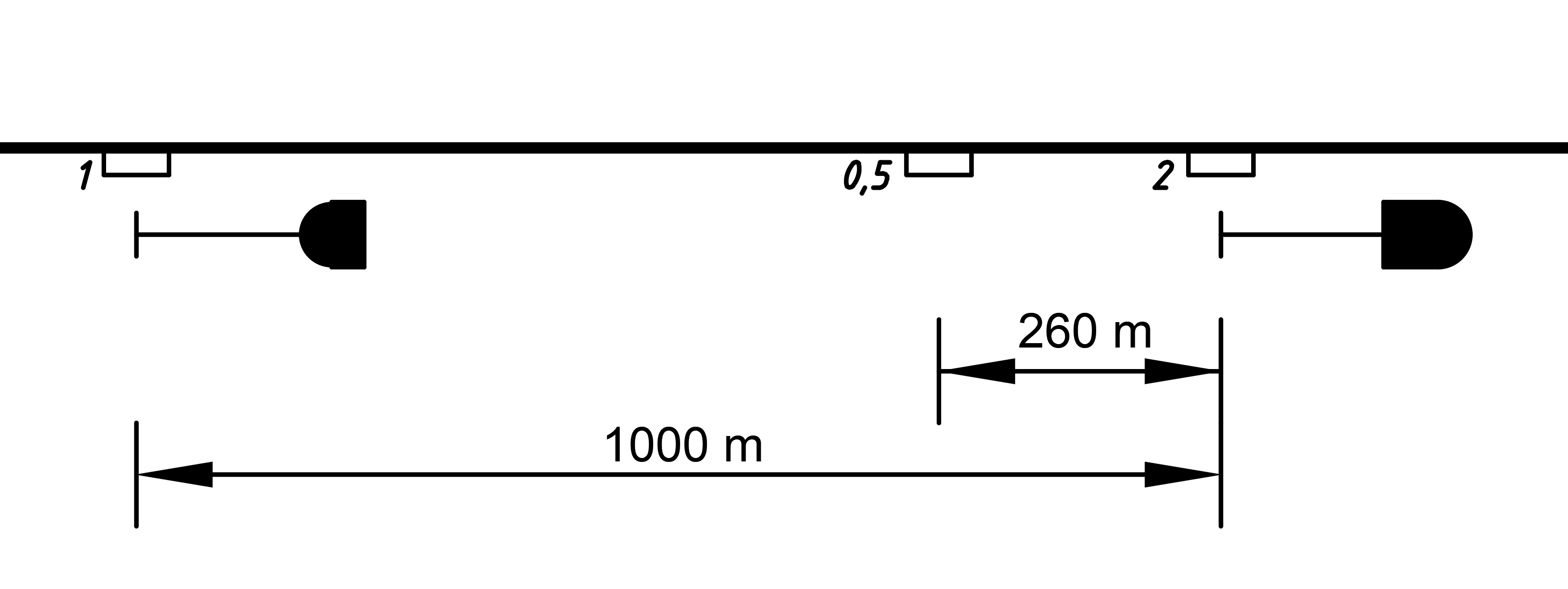
The picture below shows the Partial Block Mode. Train 1 occupies the block between the two main signals. Train 2 is a LZB train and is therefore allowed to enter the block until the section marker. Train 3 is not equipped with LZB and is therefore not allowed to enter the occupied block.
Braking curve is based on the permitted speed curve.
Warning curve and emergency braking curve are not modeled.
The braking curve is constant over the whole braking distance.
The constant deceleration is used for braking to a full stop, for speed changes and for the spacing and routing requirements.
For Partial Block Mode, LZB section markers are placed at the entry of LZB subsections.
Switches are released when the following detector is crossed.
There are no overlaps implemented yet (only affects blocking time).
All LZB-trains have a sight distance of 10.000 m (impacts the distance for average slope calculation, and maybe future work on dynamic simulation).
The slope used to choose the braking curve is the average slope calculated within these 10.000 m.
The train follows the permitted speed curve and does not brake earlier.
OSRD trains do not have brake percentage values, so an alternative to define the used braking curves was used:
The average deceleration of each speed category was calculated and the corresponding braking curves were chosen. The resulting curves are also the ones that are used the most.
The resulting curves for ≤ 200 and ≤ 250 km/h were the same so they were put together in one category
This results in the following braking curves that must be set for passenger trains:
| Slope [‰] | ≤ 160 km/h | 160 - 250 km/h | 250 - 300 km/h |
|---|---|---|---|
| ≤ 5 | 7 | 6 | 5 |
| ≤ 12,5 | 6 | 5 | 4 |
The corresponding deceleration (permitted speed curve) values that must be set for passenger trains depending on the maximum train speed and slope are as follows:
| Slope [‰] | ≤ 160 km/h | 160 - 250 km/h | 250 - 300 km/h |
|---|---|---|---|
| ≤ 5 | 0,57 | 0,51 | 0,45 |
| ≤ 12,5 | 0,51 | 0,45 | 0,39 |
possible further simplification for OSRD: deceleration in other LZB-modeling tools is 0,5 for all passenger trains
For freight trains only two decelerations (permitted speed curve) were chosen. They cover all the relevant cases for freight trains with LZB.
| Slope [‰] | ≤ 120 km/h |
|---|---|
| ≤ 5 | 0,33 |
| ≤ 12,5 | 0,27 |
possible further simplification for OSRD: deceleration in other LZB-modeling tools is 0,3 for all freight trains
¹ The slope is saved in the LZB-Control Center. We don’t yet have reliable information on how the slope in front of the train is calculated, when determining the braking curve.
The Punktförmige Zugbeeinflussung (PZB) is an intermittent train protection system used on most conventional railway lines in Germany.
Its primary function is to ensure that trains respond correctly to restrictive signal aspects and speed limits.
The PZB monitors the train’s compliance with braking requirements and automatically initiates braking interventions when these are violated.
The system acts as a safeguard against driver inattention or failure to observe signals and thereby prevents trains from passing stop signals or exceeding permitted speeds (DB, 2014).
The core tasks consist of monitoring braking maneuvers, protecting against trains continuing past stop signals, and preventing trains from moving forward against stop signals, for example after a scheduled stop at platform (DB, 2024).
The PZB consists of two main parts:

Source: Dominik Wefering
Three types of track magnets are used, each operating at a distinct frequency (DB, 2014):
| Frequency | Location | Function |
|---|---|---|
| 1000 Hz | At the distant signal | Activates supervision when the distant signal shows a restrictive aspect (Ks 2). The driver must acknowledge the magnet within 2,5 seconds and a braking sequence begins. |
| 500 Hz | About 260 m before the main signal | Reinforces braking supervision before a stop signal. The train must reduce its speed further. |
| 2000 Hz | At the main signal | Immediately triggers an emergency brake if the train passes a stop signal (Hp 0). |
On combination signals (see Ks Signalling) there are double-track magnets with frequencies of 1000 and 2000 Hz combined.
The picture below shows an distant signal with the aspect Ks 2 and the 1000 Hz magnet to the left of the signal.

Source: Dominik Wefering
The onboard system receives inductive signals from the track magnets and monitors (DB, 2014):
If the driver fails to acknowledge or reduce speed as required, the system triggers an automatic emergency brake until a full stop.
PZB makes a distinction between three train types (german: Zugart): O, M, U
The distinction is based on the brake percentages of the train (Maschek, 2022):
| Train type | Brake percentages | monitored maximum speed |
|---|---|---|
| O | > 110 | 165 |
| M | 66 - 110 | 125 |
| U | < 66 | 105 |
The braking percentage is a standardized measure in railway operations used to quantify a train’s braking capability.
It is defined as the ratio of the effective braking weight (B) to the train mass (m), multiplied by 100 (Kache, 2024):
$$ \lambda=\frac{B}{m}*100 $$
This value indicates how effectively a train can decelerate relative to its mass. A higher braking percentage corresponds to a shorter braking distance, allowing for a direct comparison between different trains.
The system evaluates train movement against predefined supervision limits. Each magnet initiates a specific monitoring function:
These parameters are dynamically managed depending on the train type.
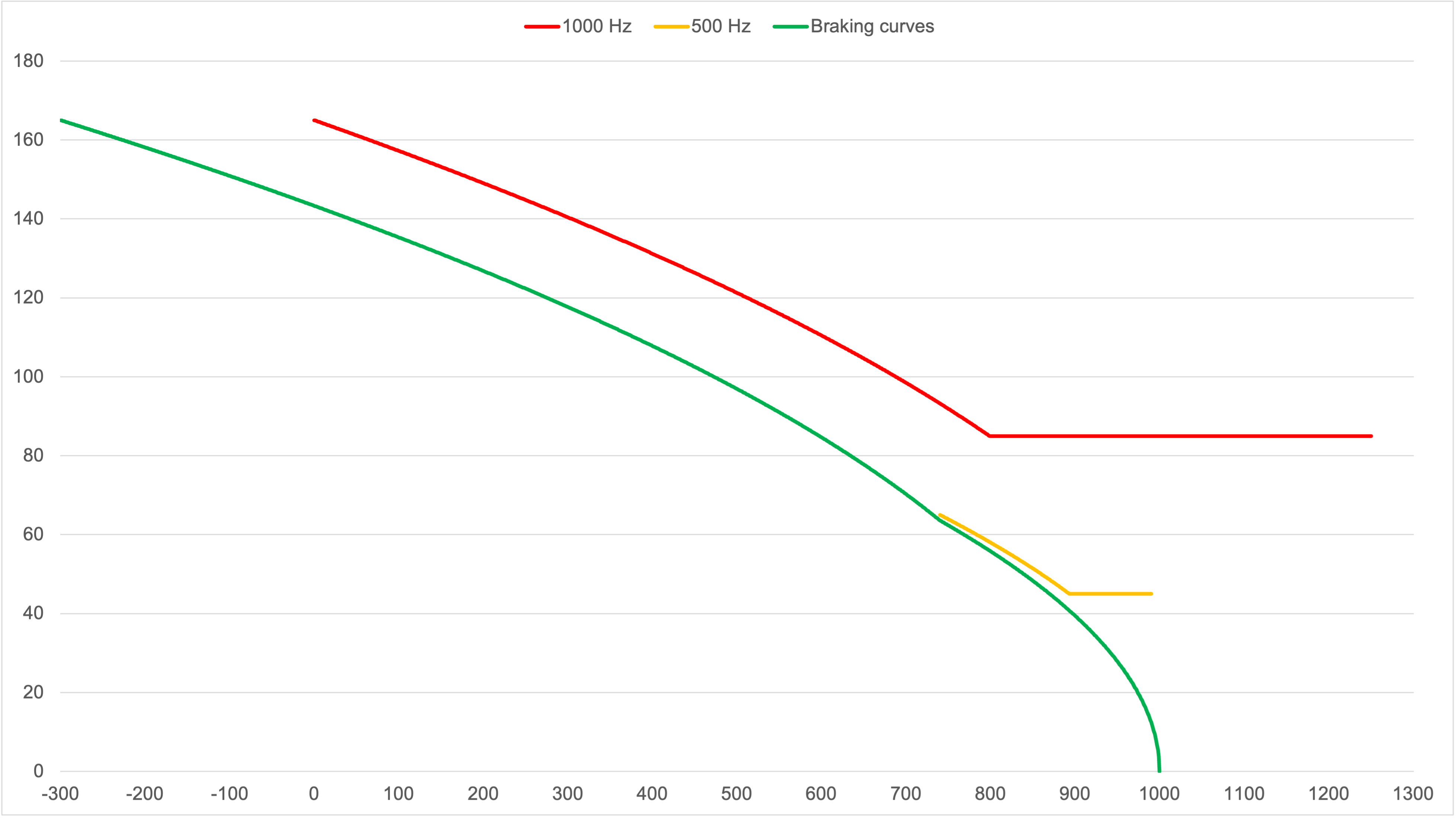
The basic principle of the supervision curves in PZB is shown in the following illustration (see following schema for the exact shape of decrease):
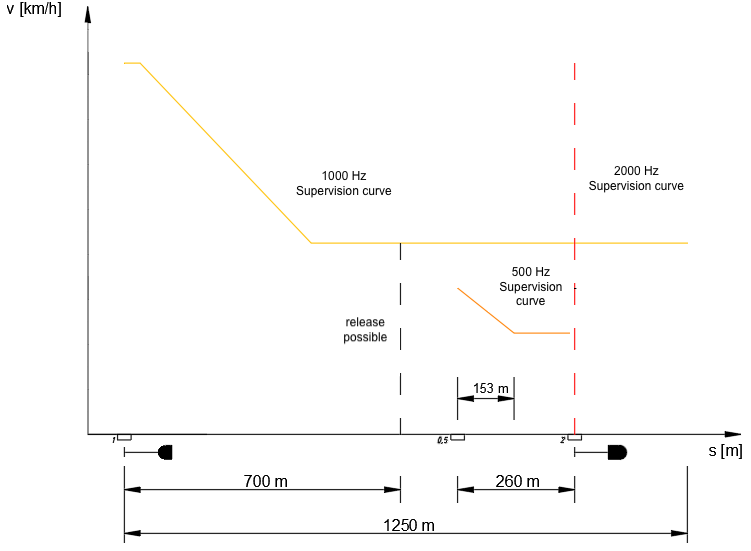
based on Maschek (2022)
The supervised values depending on the train type are as follows:
| Train type | Upper (O) | Middle (M) | Lower (U) |
|---|---|---|---|
| Maximum Speed | 165 km/h | 125 km/h | 105 km/h |
| Braking curve of 1000 Hz influence | 85 km/h after 23 Sec. | 70 km/h after 29 Sec. | 55 km/h after 35 Sec. |
| Braking curve of 500 Hz influence | from 65 to 45 km/h within 153 m | from 50 to 35 km/h within 153 m | from 40 to 25 km/h within 153 m |
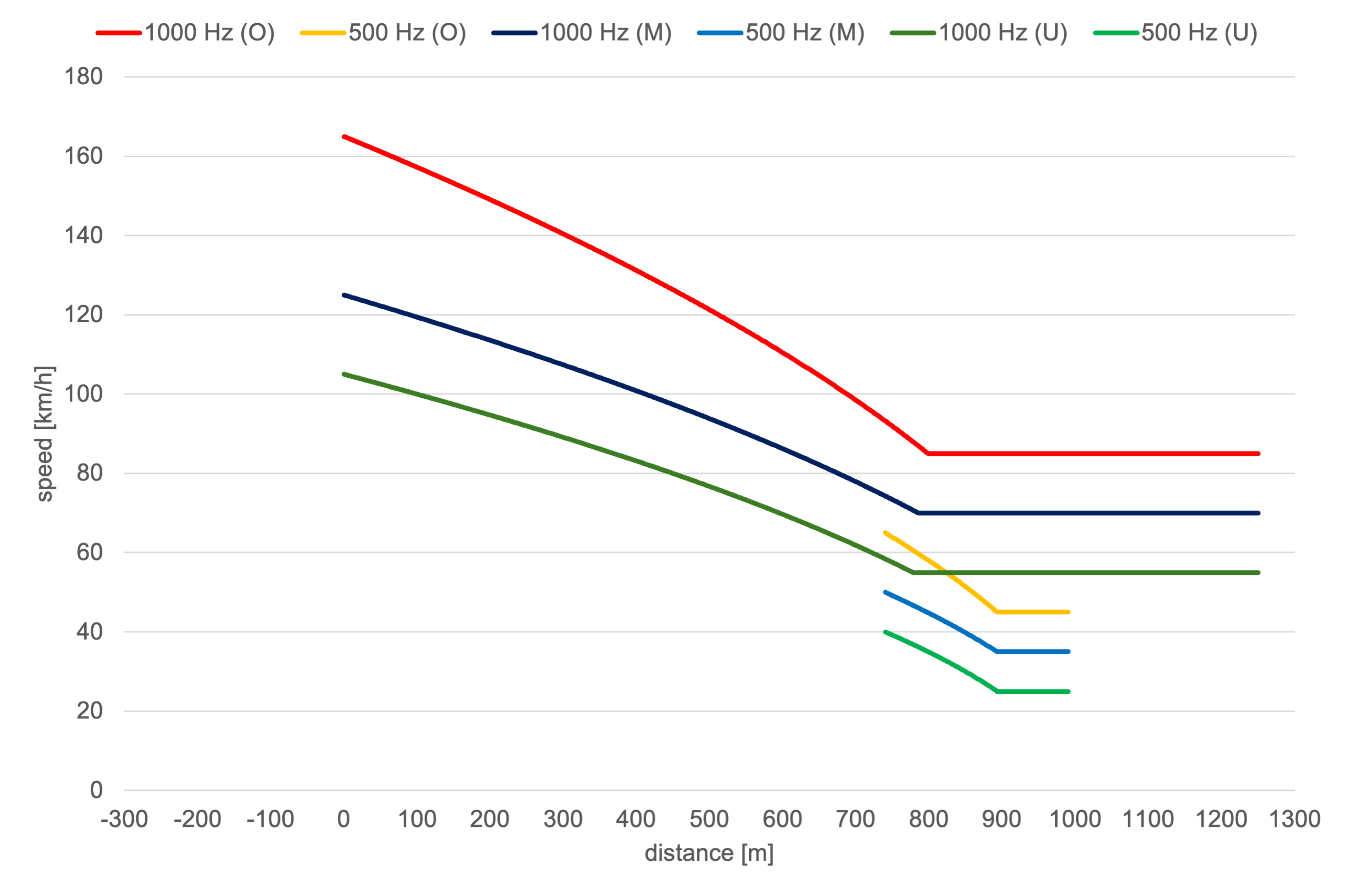
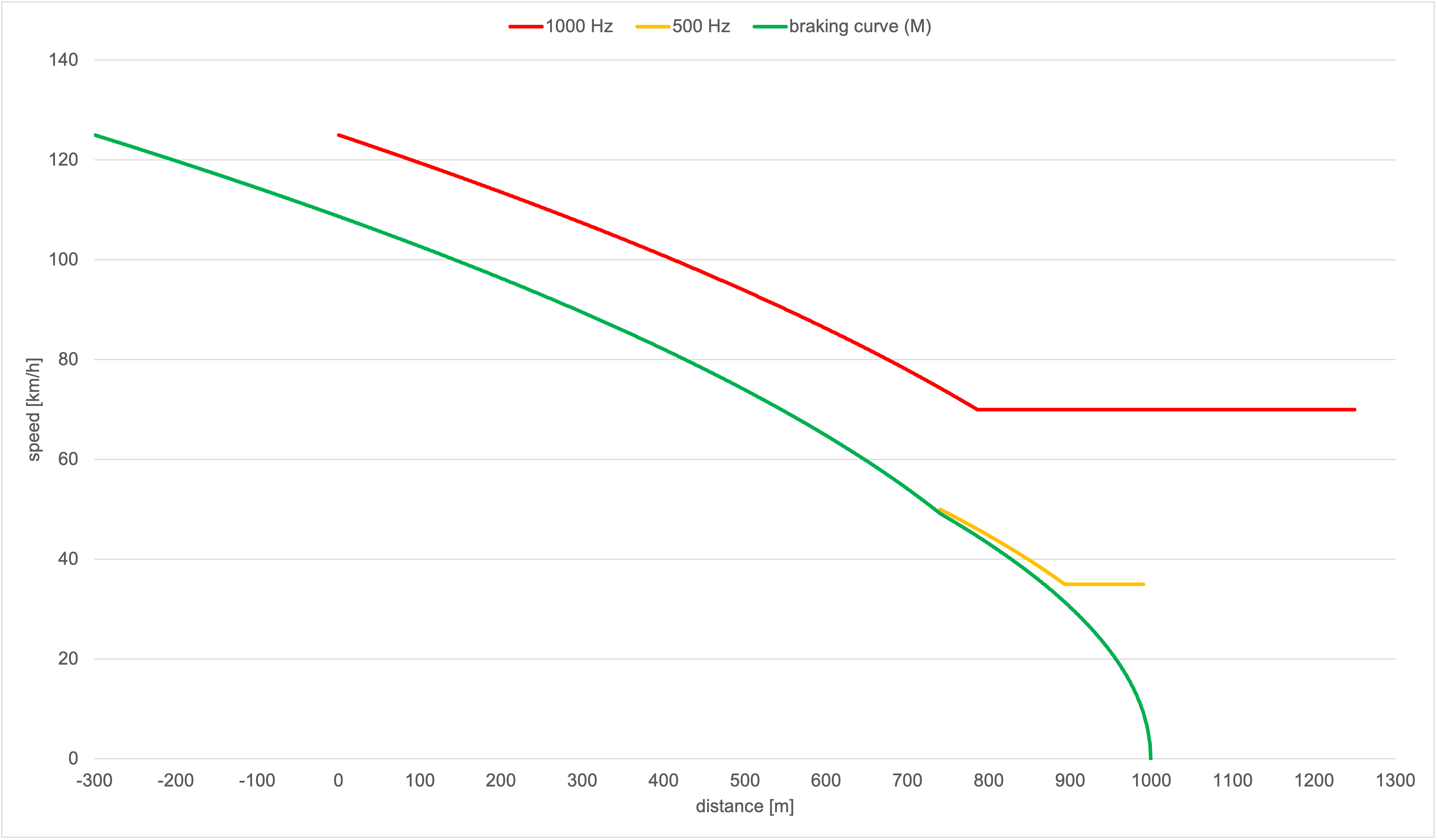
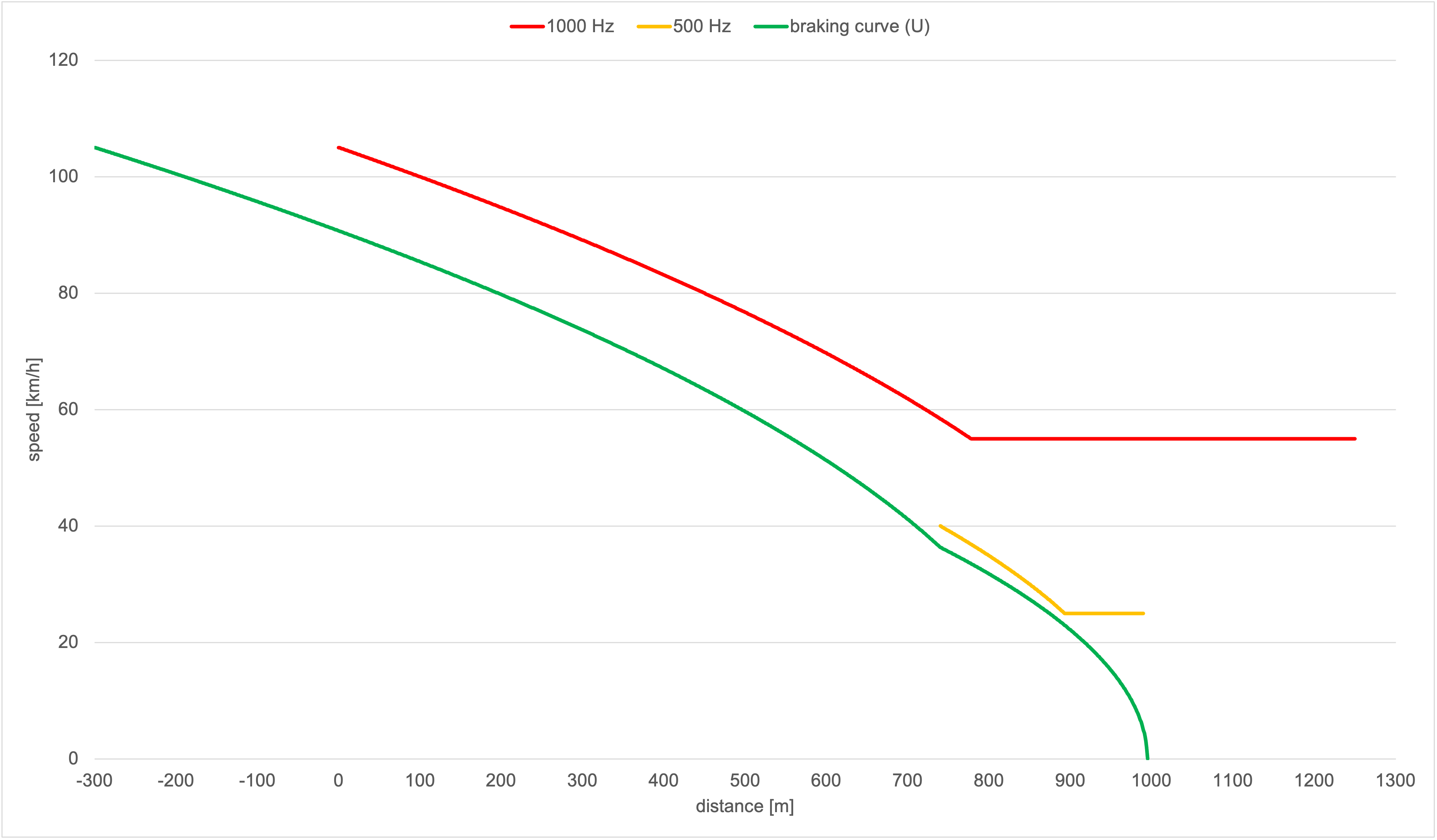
The values in the table above result in the following six supervision curves for the PZB for each train type:
700 m after the 1000 Hz influence, the train driver can stop braking if the main signal has turned back to Ks 1 in the meantime. In this case, he can accelerate again to the maximum permitted speed.
If a train stops while a PZB supervision is active, or if its speed drops below the switching speed of 10 km/h for at least 15 seconds, more restrictive supervision curves are activated.
In this restrictive mode, the 1000 Hz supervision curve is lowered to a maximum permissible speed of 45 km/h.
Similarly, for the 500 Hz supervision, the system enters a restrictive state if, within the 153 m monitoring section, the train travels for more than 15 seconds below the switching speed of 30 km/h, while the speed continues to decrease toward 10 km/h.
Typical example: When a train stops at the platform, the overlap behind the destination signal is cleared and the switches are released. The restrictive curves ensure that if the train starts moving without permission after stopping, it will travel slowly enough so as not to pose a danger to other trains. Once it arrives at the 2000 Hz magnet, its speed will be low enough for the emergency brake to make it come to a full stop wihtin the overlap.
The PZB ensures safety through automatic emergency braking when:
This guarantees that even under human error or distraction, train operations remain within safe limits and the risk of signal overruns is minimized.
The supervision curves are only used for calculating the deceleration values. They are not modeled in OSRD.
Emergency braking is not modeled and restrictive mode is not modeled.
The PZB braking curve is modeled for each train type with two constant decelerations \(a_{type,1}\) and \(a_{type,0,5}\).
The deceleration is used for braking to a full stop, for slowdowns and for spacing and routing requirements.
\(a_{type,1}\) corresponds to a deceleration that brakes the train from the maximum speed applicable to the train type \(v_{type,max}\) down to below the check speed of the 500 Hz condition \(v_{type,check,0,5}\) (1000 Hz phase).
\(a_{type,0,5}\) corresponds to a deceleration that brakes the train from the speed below the check speed \(v_{type,res,0,5}\) to a full stop within the distance between the 500 Hz Magnet and the associated main signal (500 Hz phase).
There are no overlaps implemented yet (only affects blocking time).
As PZB trains can use LZB tracks, in addition to LZB signal data should provide PZB signal at the entry of the LZB block and not at the entry of LZB subsections (It is only used for LZB partial block mode).
There is no infrastructure model for magnets in OSRD. The modeling is therefore based on signal locations.
A constant distance of \(s_{0,5}\) = 260 m is assumed as fictitious trigger of the 500 Hz phase.
A distant signal spacing of \(s_{distant}\) = 1000 m is assumed.
A sighting distance for distant signal of \(s_{sight}\) = 300 m is assumed.
OSRD trains do not have brake percentage values, so an alternative to define the used braking curves was used:
The braking curves are set depending on the rolling stock category and the train’s maximum speed.
At first we have to calculate the deceleration for the 1000 Hz Phase, which was done with:
$$ a_{type,1}=\frac{v²_{type,max}-v²_{type,check,0,5}}{2*(s_{sight}+s_{distant}-s_{0,5})} $$
| Value | Meaning |
|---|---|
| \(a_{type,1}\) | Deceleration of the 1000 Hz phase |
| \(v_{type,max}\) | Maxmimum speed per train type |
| \(v_{type,check,0,5}\) | Check speed of 500 Hz Magnet per train type |
| \(s_{sight}\) | Sighting distance for distant signals |
| \(s_{distant}\) | Distant signal distance |
| \(s_{0,5}\) | Distance of 500 Hz magnet from main signal |
The result was rounded up to two decimal places to have a fixed value and a small margin for the actual speed-check of the 500 Hz magnet.
Then with this deceleration the resulting speed at the position of the 500 Hz magnet \(v_{type,res,0,5}\) was calulated.
The next step was calculating the deceleration value for the 500 Hz phase:
$$ a_{type,0,5}=\frac{v²_{type,res,0,5}}{2*s_{0,5}} $$
| Value | Meaning |
|---|---|
| \(a_{type,0,5}\) | Deceleration of the 500 Hz phase |
| \(v_{type,res,0,5}\) | Resulting speed after 1000 Hz phase |
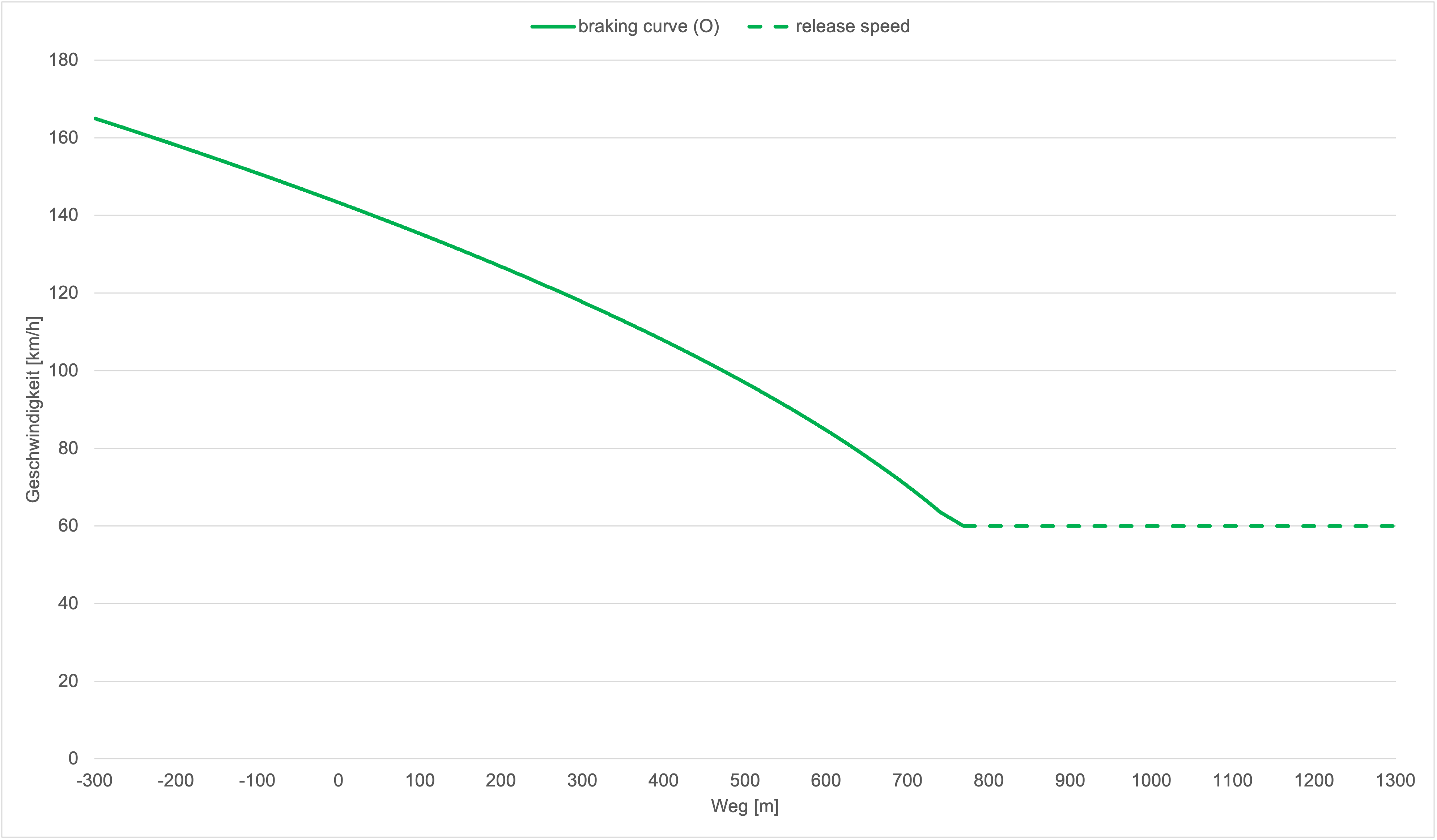
The resulting braking curves for each train type are as follows:
The 1000 Hz and 500 Hz curves are displayed for informational purpose only.
In lineside signalling like the Ks Signalling the speed restrictions generally apply at the next main signal. Therefore the slowdown needs to be handled differently, otherwise a train could harm the PZB conditions if the braking curve is applied to the destination point with the speed restriction.
For slowdowns there are two cases:
The target speed is equal or higher than the initial checked speed of the 500 Hz magnet: The train brakes directly to the destination with the constant deceleration of \(a_{type,1}\). This allows to save some capacity, since the train is able to brake later.
The target speed is below the initial checked speed of the 500 Hz magnet: The train follows the stop braking curve until it reaches the target speed and then the train continues in a steady-state running at the target speed (release speed).